Back
[00:08:07] <les_w> will html or rich text work on the sourceforge lists?
[00:11:33] <giacus> hello les_w
[00:14:37] <les_w> hi jacky
[00:45:44] <fenn> les_w: html maybe, rich text definitely not.. but most of us unix types hate html in email messages
[00:49:04] <les_w> I figured
[00:49:08] <les_w> no problem
[00:49:20] <les_w> I was just answering eric's post
[00:50:17] <les_w> wasn't even sure if sf lists were still on
[00:50:35] <jmkasunich> far as I know, lists are still working
[00:50:49] <les_w> the message posted
[00:50:52] <les_w> so yeah
[00:51:10] <jmkasunich> seems like they finally got their cvs working again
[00:51:16] <les_w> heh
[00:51:20] <jmkasunich> now that we have our own set up...
[00:51:43] <fenn> where is linuxcnc.org hosted btw?
[00:51:48] <jmkasunich> at this point I wish they would stay broken, until everybody gets the news and starts using the new server
[00:51:50] <les_w> I have been so busy that I had not noticed
[00:51:52] <jmkasunich> which part of it?
[00:52:11] <jmkasunich> the main website is hosted by Dreamhost now
[00:52:13] <fenn> we could request that they break it again :)
[00:52:17] <les_w> ha
[00:52:31] <jmkasunich> and the cvs server (along with cvsweb) is an old PC sitting at jeplers house
[00:52:42] <jmkasunich> the new cvsweb is very nice
[00:52:46] <fenn> yes
[00:55:21] <les_w> I am so busy that I'm not getting to enjoy the early spring
[00:55:30] <les_w> spring is nice down here
[01:03:30] <fenn> i havent gotten anything from emc-users since mar. 26th
[01:04:08] <jmkasunich> your mail was bouncing
[01:04:33] <fenn> * fenn scratches head
[01:05:51] <jmkasunich> unfortunately I don't have the message anymore (I'm a list admin, the mail server sends notices when it disables someones account do to bounces
[01:05:58] <jmkasunich> * jmkasunich checks your acct
[01:06:24] <jmkasunich> sdf.lones..... is you right?
[01:06:28] <fenn> yes
[01:06:40] <jmkasunich> mail was disabled, I just turned it back on
[01:06:44] <fenn> thanks
[01:07:14] <fenn> the mailserver uses spamcop which sometimes does really stupid things
[01:07:36] <fenn> like blacklisting itself :)
[01:07:45] <jmkasunich> yeah, I've had my ISP suddenly blacklist SF for no good reason, and take days to fix it
[01:08:17] <fenn> i'd much rather it just tag it as spam and send it through
[01:08:29] <jmkasunich> http://lists.sourceforge.net/lists/listinfo/emc-users
[01:08:39] <jmkasunich> you can check your acct at that url
[02:21:30] <CIA-8> 03jmkasunich * 10emc_HAL/farm_scripts/run_farm: make cvs updates use compression
[02:30:17] <asdfqwega> Ups: getting back around to getting my CNC router working again, with the latest 2.6.16 updates from Paul ^_^
[02:30:47] <asdfqwega> Downs: I can't compile emc2 with the 2.6.16 - errors about my compiler being too old :(
[02:31:44] <asdfqwega> Ups: Going to Notacon this coming weekend
[02:32:07] <asdfqwega> Downs: can't lug my cnc router with me
[02:49:18] <fenn> oo a commit message
[02:49:50] <fenn> asdfqwega: make a portable cnc router
[02:49:56] <fenn> everyone's doin it
[02:50:03] <fenn> (everyone being, well, me)
[02:50:31] <jepler_> fenn: that commit message from jmk earlier was actually from sourceforge
[02:51:40] <asdfqwega> fenn: sure thing, I'll just whip something together out of old printer parts in 3 days
[02:51:53] <fenn> right-o mate
[02:57:57] <SWPadnos> yes
[02:58:47] <Jymmm> Bah, sticking cellphones
[03:07:04] <jmkasunich> re: commit message: the farm scripts are still stored on sourceforge CVS, but that will be changing
[03:07:26] <jmkasunich> chris is working on getting commit messages and eventually CIA working on the new server, not there yet
[03:20:45] <fenn> what do you think about switching to SVN?
[03:21:02] <SWPadnos> oops
[03:21:04] <jmkasunich> too disruptive
[03:21:25] <jmkasunich> you saw paul's email today?
[03:21:39] <SWPadnos> is it on the sf lists?
[03:21:41] <fenn> yes but i didnt look at the tarball
[03:21:51] <fenn> er maybe that wasnt from today
[03:22:03] <jmkasunich> fenn, I forgot, you were bouncing, and didn't get it
[03:22:12] <fenn> * fenn looks at archives
[03:22:44] <jmkasunich> paul was complaining about the change that we made - he'd be lots louder (and maybe even a little justified) if we changed to SVN without widespread concensus among all developers
[03:23:42] <cradek> ... and he was an active developer
[03:25:39] <SWPadnos> he does have a point (unless there were board discussions / votes)
[03:26:04] <jmkasunich> it was discussed at great length on IRC, and the four board members present decided unanimously
[03:26:22] <jmkasunich> Jon elson, as usual, wasn't there
[03:26:27] <SWPadnos> ok. that should probably be pointed out to him, as a courtesy
[03:26:30] <SWPadnos> heh
[03:27:05] <jmkasunich> I wrote a long and detailed point by point rebuttal to his complaints, but I was reluctant to post it
[03:27:08] <SWPadnos> I see that Ray had a lengthy reply, which I'm just reading now
[03:27:15] <jmkasunich> I was not in a pleasant mood when I wrote it
[03:27:22] <SWPadnos> Ray's will probably suffice
[03:27:24] <SWPadnos> heh
[03:27:55] <asdfqwega> Hey Jymmm, I remember you asking once about linking multiple switching power supplies together
[03:28:38] <asdfqwega> http://www.procooling.com/index.php?func=articles&disp=52&pg=1
[03:32:18] <Jymmm> asdfqwega: Heh, that's seriously questionable.
[03:32:34] <Jymmm> asdfqwega: Sometimes the chassis ground is also serving as a heatsink
[03:37:35] <asdfqwega> Heh, I also remember telling you using PSU's in such a fashion was dangerous, at the very least.
[03:38:15] <Jymmm> not dangerous, just will instant blow up in your face.
[03:38:57] <jmkasunich> unlikely
[03:39:29] <jmkasunich> paralleling is less than ideal (you have no way to ensure sharing, one supply might be heavily loaded while the other loafs) but it can work
[03:39:53] <jmkasunich> series is pretty low risk unless you get silly (series 10 of them for 120V for example)
[03:40:04] <jmkasunich> ls
[03:40:06] <jmkasunich> oops
[03:40:19] <Jymmm> jmkasunich other window
[03:40:24] <asdfqwega> I meant dangerous, as in 'putting you hands into areas of high voltages and charged capacitors' - a detail many people forget because they can't 'see' electricity
[03:40:39] <SWPadnos> I can - it has lots of smoke in it ;)
[03:40:42] <Jymmm> oh that. no biggy there
[03:40:56] <jmkasunich> unplug, wait 10 mins
[03:41:03] <fenn> use a multimeter
[03:42:28] <jmkasunich> fenn: before you can use the meter to check the caps for residual volts, you gotta remove the board anyway (can't reach the cap terminals from the top)
[03:42:45] <jmkasunich> so the meter doesn't really gain you much safety
[03:42:59] <jmkasunich> just keep one hand in your pocket
[03:43:25] <jmkasunich> 100uF at 100V across your hand will hurt, but it won't seriously injure you
[03:43:44] <jmkasunich> same thing from arm to arm across your chest is another story
[03:44:42] <jmkasunich> the mods in that article aren't for aunt tillie, but a moderately careful and smart person can do them with rather low risk
[03:45:07] <jmkasunich> (notice all the weasel words, moderately, rather low, etc ;-)
[03:45:58] <fenn> a weasel could do them no problem
[03:46:20] <SWPadnos> the words, or the mods?
[03:46:45] <fenn> a weasel is the world's first multipurpose agent
[03:46:59] <fenn> i just like the word weasel i guess
[03:47:28] <SWPadnos> then you may enjoy Weird Al's song "Albuquerque"
[04:01:15] <Jymmm> you know, I get my hands on so so many ATX PS's, that just tossing some on plywood thru a GFI outlet can't do too much damage =)
[06:12:05] <alex_jon1> alex_jon1 is now known as alex_joni
[08:04:43] <fenn> who was it that was buying a waterjet? was it terry?
[08:08:17] <Jymmm> no clue
[08:12:23] <fenn> http://www.waterjets.org/about_abrasivejets.html <-- very informative page
[10:15:32] <fenn> gotta say i'm impressed by the "glass spring" here
http://www.waterjets.org/waterjet_pictures_4.html
[10:19:41] <A-L-P-H-A> fenn, I like the dragon, alot.
[10:20:01] <fenn> click on next about 4 times
[10:20:27] <fenn> too bad he didnt make the improved dragon
[10:28:39] <fenn> hm. "Nintendo actually made a knitting machine that plugged into the Japanese version of their early video game unit."
[10:28:55] <A-L-P-H-A> reading the stuff.
[10:29:00] <A-L-P-H-A> I'm on page eight now
[10:29:56] <fenn> i just spent about 4 hours reading that whole site
[10:30:37] <A-L-P-H-A> i wanna water jet.
[10:32:05] <A-L-P-H-A> fenn, how hard to make a water jet now these days?
[10:32:30] <fenn> that's it- nintendo based cnc control
[10:32:36] <fenn> its the wave of the future
[10:32:58] <fenn> A-L-P-H-A: looks non-trivial
[10:33:10] <fenn> i'd consider buying the nozzle and adapting a pump to it
[10:33:30] <fenn> i dont really understand why they cost $100k
[10:33:39] <fenn> nozzle is like $2k and pump is $5k
[10:33:49] <A-L-P-H-A> <shrug>
[10:33:59] <fenn> er, sorry scratch the pump value i made that up
[10:34:00] <A-L-P-H-A> they build a water tank for ti too?
[10:34:09] <A-L-P-H-A> the pump is probably expensive.
[10:34:37] <fenn> that guy says there are only about 2000 waterjets worldwide
[10:38:06] <A-L-P-H-A> really?
[10:38:23] <A-L-P-H-A> even rapid prototype machines are less expensive.
[10:38:39] <fenn> yeah but the "goo" costs a lot
[10:38:53] <A-L-P-H-A> two years ago, plastic/liquid rpm was like $50K USD.
[10:38:54] <fenn> its like $100/in^3
[10:39:01] <A-L-P-H-A> oh... eew
[10:40:24] <fenn> well it depends what technology you're talking about of course
[10:40:30] <fenn> thats the laser uv cure stuff
[10:40:42] <fenn> for high resolution
[10:42:03] <A-L-P-H-A> bbl. thanks for the site fenn
[10:48:31] <fenn> howdy there
[11:02:57] <les_w> morning
[11:08:59] <A_Guy> A_Guy is now known as Yuga
[12:05:23] <Bo-Dick> it's confirmed. the "double pulse" behaviour was caused by the fact that i've used only one current regulator to drive both coils of the stepper motor.
[12:28:10] <Bo-Dick> when a stepper motor enters a resonant state and the torque falls to zero how long would it take for the motor to recover to normal operation?
[12:30:43] <les_w> depends on the q of the resonance
[12:31:01] <les_w> radial shaft dampers can work wonders though!
[12:33:41] <Bo-Dick> lets say that i would de-energize the motor for five seconds. is there any chance in the world that it would resonate after that?
[12:35:37] <skunkworks_wrk> morning
[12:36:00] <skunkworks_wrk> hmm - must have left my portable on at home.
[12:36:23] <skunkworks_wrk> hey - ray. Where do you get replacement brushes for servos?
[12:36:32] <skunkworks_wrk> where is a good place.
[12:37:25] <skunkworks_wrk> these would be 1/4X7/16X7/8 - length isn't as critical.
[12:37:34] <rayh> Grainger has quite a few.
[12:37:45] <skunkworks_wrk> have to look. thanks
[12:38:58] <rayh> Sometimes I've been able to get replacement stuff from a Milwaukee hand tool repair shop.
[12:39:47] <skunkworks_wrk> we have a local motor repair shop also that looks like they where doing the service on it.
[12:39:56] <skunkworks_wrk> on the servos.
[12:40:06] <rayh> You also ought to have some old guy who rebuilds motors around LaCrosse. These have a nearly endless supply.
[12:40:21] <skunkworks_wrk> :)
[12:40:30] <skunkworks_wrk> where are you located?
[12:40:34] <rayh> Great minds!
[12:41:27] <rayh> Crystal Falls, MI
[12:41:49] <rayh> 'bout 130 miles north of Green Bay and a bit west.
[12:42:08] <les_w> sorry bo was away....no resonant time constants would be in the tens of millisecond range at most
[12:42:16] <les_w> hi ray
[12:42:24] <les_w> and sam
[12:42:41] <rayh> Hi Les
[12:42:47] <skunkworks_wrk> we just had a guy come from MI to pick up a 50 hp dc spindle motor from one of our old lathes - do you know him ;)
[12:42:50] <skunkworks_wrk> hi les
[12:43:06] <skunkworks_wrk> he was going to use it for a saw mill.
[12:43:14] <les_w> wow
[12:43:39] <rayh> Not right off. I may get a call out of the blue about it though?
[12:44:05] <skunkworks_wrk> the guy said he knows someone who could make a speed control for it. :)
[12:44:33] <rayh> What was the voltage on that?
[12:44:40] <skunkworks_wrk> probably some guy who thinks he can make a single scr speed control for it. ;)
[12:44:53] <les_w> I have lots of wood to cut...but for next yrar's firewood. Gas bill for jan-march was $1800....never again!!!
[12:44:54] <skunkworks_wrk> I don't remember off hand.
[12:45:26] <skunkworks_wrk> wait - maybe I do
[12:45:26] <rayh> Ho Wah! That's more than my whole year.
[12:45:51] <les_w> yeah it's crazy.
[12:45:57] <skunkworks_wrk> yeh - I go through one 500gal tank of propane for my house in a year.
[12:46:23] <les_w> for vermont right?
[12:46:33] <les_w> I'm getting ripped.
[12:46:36] <rayh> Two tanks here.
[12:47:13] <skunkworks_wrk> * skunkworks_wrk put lots of extra insulation in the house when it was built it.
[12:47:22] <rayh> Pre buy kept this years cost pretty low.
[12:47:52] <skunkworks_wrk> * skunkworks_wrk got pallets of damaged sheet foam from menards cheap.
[12:48:21] <rayh> That speed control is probably a variable transformer and hurky rectifiers.
[12:48:24] <les_w> well, with 10,000 or so oaks on the property I shouldn't be giving the gas company money.
[12:48:48] <les_w> and I won't again.
[12:49:00] <les_w> I just ran out of dry wood.
[12:49:35] <les_w> A lot of the cost was heating the shop I guess.
[12:49:39] <skunkworks_wrk> it ws a relience dc motor 50hp 240v 180amps 850-2800rpm shunt with 2.81 amp field 240v
[12:49:42] <Bo-Dick> has anyone heard about so called "midband resonance" for stepper motors?
[12:49:44] <les_w> two buildings to heat
[12:49:53] <rayh> It seems most businesses have the desire to gouge
[12:50:12] <les_w> yeah.
[12:50:30] <les_w> Yes familiar with mid band resonance bo
[12:50:40] <rayh> I'll be on the lookout for that guy. No way I want anything to do with it.
[12:51:31] <rayh> I had a big fight with Reliance over a control of theirs for a 150 hp motor drive.
[12:51:55] <rayh> Ran fine for a while and then would blow a chunk out of the commutator.
[12:52:08] <Jymmm> rayh who won?
[12:52:09] <skunkworks_wrk> We still have the drive. Don't remember the brand but probably relience.
[12:52:12] <skunkworks_wrk> eww
[12:52:33] <Bo-Dick> when my stepper driver has been runnin' for a while it starts to behave jerky. could it be midband resonance?
[12:52:48] <skunkworks_wrk> we still have one more of these 50hp motors..
[12:52:49] <rayh> I did. The rep came out and megged the motor. Started up the drive with the cover off the brushes.
[12:52:52] <les_w> hmm
[12:53:25] <les_w> could be as things warm up I guess bo.
[12:53:29] <rayh> Blew a hole in his shirt and caused a nasty burn.
[12:53:35] <les_w> cold lube could act as a damper
[12:53:58] <Jymmm> ouch
[12:54:01] <skunkworks_wrk> did he notice you where standing behind him?
[12:54:05] <skunkworks_wrk> :)
[12:54:15] <rayh> Bo-Dick, What kind of drive are you using.
[12:54:25] <Bo-Dick> my own home-made
[12:54:29] <rayh> I was standing off the end of the motor shaft.
[12:54:58] <rayh> Full step, microstep...
[12:54:58] <les_w> mid band resonance is usually caused by poles created from interaction of radial compliance of the magnetic forces with rotor mass
[12:55:06] <les_w> or shaft radial harmonics
[12:55:16] <Bo-Dick> i'm using full step mode
[12:55:29] <skunkworks_wrk> have you tried half-stepping?
[12:55:37] <les_w> yup, microstepping tends to excite poles less.....
[12:56:07] <rayh> Has the motor ever been taken apart?
[12:56:22] <Bo-Dick> the thing is that when i turn off the motor for around ten seconds after the jerky behaviour and turns it on again it still acts jerky.
[12:56:29] <rayh> Stepper motor that is not sk's 50 hp.
[12:56:51] <Bo-Dick> the motor _has_ been taken apart several times yes.
[12:56:57] <les_w> bo sounds like some thermal effects
[12:57:04] <les_w> is it a lead screw?
[12:57:24] <skunkworks_wrk> we had never had it apart - but it was running. Our service didn't like it though.
[12:57:24] <Bo-Dick> the motor isn't hooked to anything yet mecanically.
[12:57:31] <les_w> ok
[12:58:12] <les_w> often results will be better when hooked to a load with some friction
[12:58:12] <rayh> Bo-Dick, Throw the stepper motor away.
[12:58:18] <les_w> haha
[12:58:24] <fenn> good advice
[12:58:35] <fenn> * fenn flings poo at stepper motors
[12:58:40] <les_w> servo is good.
[12:58:45] <fenn> brushless servo is better
[12:59:06] <les_w> we don't use steppers in machine tools.....and haven't for many many years
[12:59:07] <fenn> linear motor is best :)
[12:59:10] <Bo-Dick> are servo motors digitally controlled?
[12:59:24] <les_w> ultimately yes
[12:59:41] <rayh> The magnets in a stepper are critical and if not taken apart with great care and a replacement rotor, they will loose a lot of their ability.
[13:00:10] <fenn> why is that?
[13:00:17] <fenn> mechanical shock?
[13:00:40] <fenn> is it bad to hammer on my motors? :)
[13:00:54] <les_w> self demagnetization
[13:01:10] <fenn> how do the magnets know they're outside of the case?
[13:01:13] <rayh> I don't know fenn. But a stepper that is taken apart without care will loose up to 85% of torque.
[13:01:19] <les_w> although ferrite and rare earth are fairly resistant
[13:01:28] <fenn> rayh: what do you mean "without care"
[13:01:40] <les_w> after 3 drinks.
[13:01:48] <Jymmm> Steppers AND Drivers -->
http://cgi.ebay.com/NEW-3-262oz-in-Single-Shaft-Bi-Polar-Stepper-Motors_W0QQitemZ7605335184QQcategoryZ78196QQcmdZViewItem
[13:02:07] <rayh> I do this by turning a replacement rotor out of steel or getting a tube about the size of the old.
[13:02:27] <rayh> remove one end bell and push the rotor out with the replacment.
[13:02:43] <jepler_> jepler_ is now known as jepler
[13:02:50] <rayh> I do the same for dc motors.
[13:02:53] <fenn> i thought the magnets were on the rotor
[13:03:32] <fenn> jymmm that's not a bad deal
[13:03:34] <rayh> On steppers they are outside. The rotor looks like a wierd toothed gear.
[13:04:03] <Jymmm> fenn: not too shabby at all
[13:04:13] <rayh> On brush type dc the permenant magnets are also on the outside.
[13:05:26] <Jymmm> $21 driver kit
http://www.electronicutopia.com/index.html?lang=en-us&target=d43.html#p358
[13:06:15] <Bo-Dick> in fact i've noticed the motor got weaker after the first time i took it apart. can someone please explain this becauce it just doesn't make sense.
[13:06:33] <les_w> Well, I have to go out and cut tractor PTO shafts to size on the horizontal band saw. Later!
[13:06:46] <les_w> oh, bo was it an alnico magnet motor?
[13:07:09] <Bo-Dick> it's small floppy drive steppers
[13:07:46] <les_w> alnico is prone to self demagnitization
[13:07:51] <fenn> jymm yeah it doesnt do current limiting though (the bi-samc)
[13:08:04] <Jymmm> ah
[13:08:35] <skunkworks_wrk> well my portable at home must have went dead ;)
[13:08:38] <les_w> removing from the low reluctance of the magnetic circuit causes a permanent drop in flux density
[13:08:39] <fenn> at least that was the conclusion the last time we talked about it
[13:09:02] <les_w> like a "keeper" on a magnet
[13:09:02] <skunkworks_wrk> skunkworks_wrk is now known as SkunkWorks
[13:10:40] <rayh> Bo-Dick, A bit of damping might smooth it out some so you can see how it acts under load.
[13:10:57] <rayh> Drag is better than a flywheel.
[13:11:14] <les_w> an oily rag held on the shaft is my favorite...
[13:11:24] <les_w> if the motor is small.
[13:11:44] <SkunkWorks> when I was playing with steppers - I had to put some sort of load on the steppers. (I used flywheels though to test)
[13:11:46] <rayh> That works.
[13:11:51] <Bo-Dick> in fact the motors are a lot weaker now after i took them apart. i should never have taken them apart. i had to convert some of them from unipolar to bipolar but hey they were better the way before.
[13:12:43] <Bo-Dick> what can i say, holy shit
[13:12:50] <les_w> don't worry....Nema 17s are free to $5...just toss 'em
[13:12:56] <rayh> Life's like that.
[13:13:24] <Bo-Dick> apparently i don't know too much about magnetization and demagnetization
[13:13:47] <rayh> We learn from experience, if at all.
[13:13:49] <Jymmm> Place a free ad that you'll pickup used/broken copy machines for $25 then strip the stepper motors out of it.
[13:14:52] <Bo-Dick> what causes this demagnetization? is it if the rotor touches the stator coils?
[13:16:17] <les_w> The High reluctance of an open magnetic circuit acts similarly to a demagnetizing field
[13:16:58] <Bo-Dick> sorry i don't understand
[13:17:22] <fenn> * fenn is glad Bo-Dick asks all the stupid questions so he doesnt have to
[13:18:04] <Bo-Dick> is it the movement when the rotor is removed that causes this loss?
[13:18:23] <Bo-Dick> ...or the time when the rotor and stator is apart from each other?
[13:18:49] <fenn> i think its the field strength of the magnets interacting with each other
[13:19:12] <fenn> the casing normally conducts the flux through the laminations, spreading the flux over a wider area
[13:19:30] <fenn> er, the rotor i mean
[13:19:36] <fenn> not casing
[13:19:56] <Bo-Dick> so it's the _rotor_ that get damaged when it's not in place in the stator?
[13:20:30] <Jymmm> I got some hi-res pics of a disassembled stepper motor around here somewhere =)
[13:21:55] <les_w> if you want to know....
[13:21:59] <les_w> http://www.intemag.com/designtools/designguide_4.asp
[13:22:16] <Bo-Dick> i'm sorry but i'm very intrested in getting a very clear explanation why my motors are ruined for taken them apart and would be intrested to know if there is somethin' i could do to refresh them after this brutal treatment.
[13:23:32] <les_w> you would have to remagnetize....too much trouble
[13:23:40] <rayh> I don't know any way to refresh.
[13:23:55] <les_w> Wish I could explain in simpler terms
[13:24:03] <les_w> but I can't
[13:24:21] <rayh> Factories do it after assembly but they use specialized machines for each motor.
[13:24:25] <les_w> the stell keeper on a horseshoe magnet is a perfect example
[13:24:27] <Bo-Dick> how on earth were the motors constructed then if the rotor and stator can't be apart from each other?
[13:24:44] <Jymmm> Bo-Dick: Reluctance Changes
[13:24:44] <Jymmm> These changes occur when a magnet is subjected to permeance changes such as changes in air gap dimensions during operation. These changes will change the reluctance of the circuit, and may cause the magnet's operating point to fall below the knee of the curve, causing partial and/or irreversible losses. The extents of these losses depend upon the material properties and the extent of the permeance change. Stabilization may be achieved by pre-exposure of t
[13:25:08] <les_w> they can be magnetized in place
[13:25:40] <Bo-Dick> are both the stator and rotor damaged or only the rotor?
[13:25:55] <les_w> just the magnets
[13:25:56] <rayh> Only the magnets.
[13:26:01] <les_w> haha
[13:26:01] <fenn> so you raise the motor to curie temperature, turn the steppers on, and cool?
[13:26:10] <fenn> sounds too easy
[13:26:23] <les_w> heh
[13:26:39] <rayh> Fenn builds a stepper motor repair oven.
[13:26:43] <Jymmm> fenn: I'm assuming that is 300 C, not F
[13:26:54] <les_w> well it would take a 2+ Tesla field
[13:27:04] <les_w> no need to raise to curie temp
[13:27:17] <fenn> sounds tough to make a 2 tesla field
[13:27:23] <Bo-Dick> well guys, i'm not a lucky guy thats for sure
[13:27:40] <Jymmm> fenn: Daaaaaaaamn.... 25000steps per revolution.
[13:27:47] <les_w> it is usually done with capacitor discharge into a single turn coil
[13:27:50] <fenn> * fenn rolls eyes
[13:27:53] <Bo-Dick> i _had_ to take the motors apart to be able to convert them to bifilar
[13:28:22] <Bo-Dick> ...and now theyre ruined
[13:28:30] <fenn> you fool!
[13:28:36] <les_w> haha
[13:28:42] <giacus> :D
[13:28:42] <Bo-Dick> wholy f*ck
[13:28:56] <fenn> * fenn wallows in self pity
[13:29:02] <giacus> morning folks
[13:29:10] <les_w> hi giacus
[13:29:11] <Bo-Dick> i had a feelin' the motor felt different after reassembly. now i got the explanation for this
[13:29:12] <fenn> someone put me out of my misery
[13:29:44] <Jymmm> fenn you sure about that?
[13:29:58] <Bo-Dick> does anyone know how much effort it was to convert them to bifilar
[13:30:08] <fenn> jymmm just prescribe me some drugs and that's that
[13:30:19] <fenn> lock me away on the isle of lesbos
[13:30:43] <les_w> there's a big puddle of self pity outside. I think I'll go wallow in it too.
[13:30:46] <Jymmm> fenn that be torture
[13:31:14] <fenn> prozac destroys your sex drive
[13:31:26] <Bo-Dick> i guess i've learned a lesson. never take a stepper motor apart, never!
[13:32:12] <fenn> my steppers say on them "do not take apart. motor characteristics will be altered"
[13:32:25] <fenn> well something like that
[13:32:33] <Bo-Dick> if it's internally connected to be a crappy unipolar configuration let it be that way
[13:33:01] <Bo-Dick> fenn: are you kiddin' man?
[13:33:07] <les_w> plenty of cheap bipolars out there
[13:33:48] <Jymmm> les_w you talking people or motors still?
[13:34:14] <Bo-Dick> i'm also aware that the motor characteristics can be ruined by overvoltage, overcurrent and stuff like that.
[13:34:48] <Bo-Dick> stepper motors don't grow in the garden. i had my chance and it's wasted
[13:34:59] <Jymmm> Bo-Dick: how many motors have you taken apart and how many do you have in reserve?
[13:35:20] <Bo-Dick> i had four. i modified all of them to bifilar. they're all ruined!
[13:35:58] <les_w> most anything I take apart ceases to function properly.
[13:36:30] <Bo-Dick> it looked very much the same when reassembled but what you see isn't what you get.
[13:36:36] <fenn> les you're a poor excuse for an engineer
[13:36:37] <les_w> Putting it back together helps sometimes.
[13:36:47] <les_w> fenn: haha
[13:37:04] <les_w> I'm an engineer not a repairman fenn
[13:38:04] <les_w> When smething breaks I just say " crummy design"
[13:38:12] <fenn> heh me too
[13:38:19] <les_w> unless I designed it...
[13:38:22] <fenn> it's not eediot proof enough
[13:40:33] <les_w> If I design something and it breaks I claim improper maintenance.
[13:40:40] <les_w> haha
[13:41:01] <fenn> i generally blame it on being held together with chewing gum and drywall screws
[13:41:55] <les_w> well, again, off to cut PTO shafts. I hope they were designed properly.
[13:42:02] <fenn> gnite
[13:42:10] <fenn> * fenn goes to bed for real this time
[13:42:25] <giacus> fenn: O_O
[13:42:37] <giacus> go to bed at 15:42 ?
[13:42:53] <giacus> :P
[13:46:56] <giacus> Im learning to sleep as an horse, up
[13:47:11] <giacus> latest night i was sleeping with LaTex
[13:47:22] <giacus> the night before with xhtml
[13:47:23] <Jymmm> giacus you're beginning to look like a horse, or just need a shave =)
[13:47:27] <giacus> :((
[13:47:38] <giacus> *_*
[13:47:47] <Jymmm> (.) (.)
[13:47:53] <giacus> hehe
[13:48:08] <giacus> * giacus love the milk
[13:48:15] <Jymmm> lol
[13:48:20] <giacus> :D
[13:49:30] <giacus> yes, dear Jymmm , we're going to become not Humans !
[13:49:38] <giacus> O_o
[13:50:07] <giacus> cyberspace has you
[13:50:11] <giacus> :))
[13:51:46] <giacus> * giacus back to the real world ..
[13:51:50] <giacus> later :)
[13:51:56] <giacus> giacus is now known as giacus_afk
[13:57:46] <anonimasu> Bo-Dick: www.aratron.se
[13:57:52] <anonimasu> they do grow in the garden..
[13:59:31] <anonimasu> just not free.
[14:02:13] <Bo-Dick> so what do they cost their stepper motors
[14:02:49] <anonimasu> call them..
[14:03:07] <anonimasu> for the larger ones about 1500sek..
[14:03:45] <Bo-Dick> for 1500sek one could get a xylotex four axis stepper system with both drivers and motors
[14:04:24] <Jymmm> Bo-Dick: Just a thought... Steppers AND Drivers -->
http://cgi.ebay.com/NEW-3-262oz-in-Single-Shaft-Bi-Polar-Stepper-Motors_W0QQitemZ7605335184QQcategoryZ78196QQcmdZViewItem
[14:04:38] <anonimasu> Bo-Dick: so?
[14:04:45] <Jymmm> Just saw it today on ebay, no idea on them.
[14:06:23] <anonimasu> Bo-Dick: or wait, that was on elfa.. they were 1500sek..
[14:06:25] <Bo-Dick> how can one motor compete with a full four axis system?
[14:06:57] <anonimasu> because that motor has more torque then the 3 others?
[14:07:38] <Bo-Dick> prolly but i'm not gonna make industrial robots to build cars
[14:08:19] <anonimasu> have a search at elfa for steppers..
[14:08:38] <anonimasu> http://www.elfa.se/elfa-bin/setpage.pl?http://www.elfa.se/elfa-bin/dyndok.pl?lang=se&dok=5808.htm
[14:08:39] <Bo-Dick> they also cost around 1500 for the motor only
[14:09:21] <Bo-Dick> i haven't seen amyone trying to compete with xylotex from a price point of view!
[14:09:45] <Bo-Dick> and that was _four_ axis!
[14:10:09] <Bo-Dick> and the price was 113$ for _both_ motors and the driver. hey that's insane!
[14:11:19] <anonimasu> I've got a 7000 sek servo + amp on my desk if you would like to buy it..
[14:11:21] <Bo-Dick> btw, elfa's "moons" motors aren't bifilar, only six leads from the motor.
[14:11:35] <anonimasu> ;)
[14:12:27] <Bo-Dick> i bet the industrial robots at car factories are a couple of million sek each
[14:13:18] <anonimasu> brb..
[14:13:22] <anonimasu> going to go home from work
[14:13:30] <Bo-Dick> but they pay off them selves on the other hand
[14:14:52] <Bo-Dick> btw, how come the transistor "N12101" from texas instrument is so INCREDIBLE rare?
[14:15:12] <Bo-Dick> try to google on it and you'll find NOTHING AT ALL
[14:15:22] <Bo-Dick> no even on ALLDATASHEET.COM!
[14:15:53] <Bo-Dick> am i lookin' at the serial number or somethin'?
[14:16:04] <Bo-Dick> i just don't get it
[14:17:35] <Bo-Dick> it's in a TO-39 case and it's definitely texas instruments. the data says "N12101" and i know it's a NPN tranny
[14:18:25] <Bo-Dick> yes i'm aware they're obsolete yes i know but i use to get some information on old parts sometimes. it's a complete mystery why this one is so incredible "under cover"
[14:24:39] <SkunkWorks> ray: are you still around?
[14:24:58] <SkunkWorks> rayh:
[14:25:22] <Bo-Dick> SkunkWorks: ray is prolly asleep at this time a day
[14:25:41] <SkunkWorks> ray is in my time zone ;)
[14:25:49] <SkunkWorks> or pretty close
[14:25:59] <Bo-Dick> really
[14:26:50] <SkunkWorks> <rayh> Crystal Falls, MI
[14:26:59] <SkunkWorks> that is north of me.
[14:27:42] <SkunkWorks> although he could be napping ;)
[14:28:02] <Bo-Dick> the time must be like 10:30 am for you guys
[14:28:53] <SkunkWorks> 9:30 for me
[14:29:15] <Bo-Dick> ok. its one timezone for NY then
[14:29:52] <SkunkWorks> we are 2 hours ahead of ny - for me it is chicago IL time.
[14:30:01] <SkunkWorks> 6 hours from gmt
[14:33:17] <Bo-Dick> wholy shit. chicago is two timezones away from ny
[14:33:29] <SkunkWorks> yep
[14:36:08] <SkunkWorks> here is what you need
http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[14:37:12] <Bo-Dick> tachometer huh?
[14:38:58] <SkunkWorks> big dc servo
[14:53:24] <SkunkWorks> logger_aj: bookmark
[14:53:24] <SkunkWorks> See
http://solaris.cs.utt.ro/irc/irc.freenode.net:6667/emc/2006-04-05#T14-53-24
[15:02:40] <rayh> I was off on the phone.
[15:03:10] <SkunkWorks> http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[15:04:22] <SkunkWorks> 1 of the 3 we need drives for. Looking at the rutex right now 40a 200v
[15:05:01] <SkunkWorks> http://www.electronicsam.com/images/KandT/servotag.JPG
[15:05:25] <SkunkWorks> I hate people. Notice it looks like it was chissled on to get off.
[15:07:00] <SkunkWorks> it came off direct drive on a 2 lead per inch ball screw and will be used on a 3 lead per inch ballscrew. Loose top end but gain force. we really don't know the top rpm of these things yet.
[15:09:54] <SkunkWorks> the price was right.
[15:23:41] <anonimasu> hm
[15:23:42] <anonimasu> iab
[15:26:19] <SkunkWorks> anonimasu: thanks for the link to the rutex drives - they are the top of the list right now
[15:26:34] <SkunkWorks> the have a 40amp 200volt drive.
[15:27:26] <anonimasu> rutex?
[15:27:29] <rayh> There are some who will say that rutex drives require some pretty tight motor specs in order to achieve the rated current.
[15:27:38] <anonimasu> I cant remember posting one
[15:27:46] <SkunkWorks> Thought it was you :)
[15:27:55] <SkunkWorks> maybe not.
[15:28:03] <anonimasu> heh
[15:28:37] <SkunkWorks> rayh: what do you mean by "pretty tight"
[15:29:24] <rayh> If a motor's inductance doesn't match the test bench model used, you won't get anywhere near rated amps.
[15:34:10] <anonimasu> hm
[15:35:44] <SkunkWorks> hmmm
[15:36:25] <rayh> I've also heard of the need to add inductance or current limiter resistors if the inductance of the motor is to low.
[15:36:51] <SkunkWorks> rayh: can you look at the pictures and tell me the inductance of the motor? ;)
[15:38:20] <rayh> I doubt it. Les would be better here than this old boy.
[15:38:39] <SkunkWorks> hm we have an lcr meter.
[15:40:08] <SkunkWorks> * SkunkWorks was kidding about inductance
[15:41:24] <rayh> I seem to remember les talking a while back about how to compute inductance.
[15:41:46] <rayh> In the event that it wasn't listed on the nameplate.
[15:42:12] <SkunkWorks> don't think it is
[15:43:37] <rayh> Older motors tend to have higher inductance.
[15:44:13] <rayh> So if you really need these motors to snort, get a full servo drive.
[15:44:40] <rayh> The servo dynamics drives I put on the mazak were really nice.
[15:46:57] <SkunkWorks> where did you get those? what about price?
[15:47:03] <SkunkWorks> ball park
[15:48:54] <rayh> $309 each new.
[15:49:07] <SkunkWorks> how many amps?
[15:49:37] <rayh> Don't remember right off. 20 seems to bubble up.
[15:49:46] <SkunkWorks> thanks
[15:50:07] <rayh> They have obsoleted those but still ship.
[15:50:27] <rayh> The newer series is a bit more but also a bit more feature filled.
[15:50:35] <SkunkWorks> do remember the specs on the mazak servos?
[15:55:34] <SkunkWorks> were they bruched dc servos or something else?
[15:56:44] <Bo-Dick> a stepper motor has a pretty simple interface namely step and dir pulses. how does the interface look like from a servo motor?
[15:57:09] <bill2or3> servo's are pwm right?
[15:57:13] <anonimasu> 0-10v input..
[15:57:14] <anonimasu> or pwm
[15:57:20] <bill2or3> I only understand them basicially, from rc modeling
[15:57:25] <cradek> http://emergent.unpythonic.net/index.cgi/projects/01142347802
[15:57:31] <SkunkWorks> +/- 10 volt isn't it?
[15:57:40] <anonimasu> SkunkWorks: hm, yeah..
[15:57:49] <SkunkWorks> :)
[15:59:32] <Bo-Dick> what i'm talking about is of course the interface between the pc and servo drive unit
[15:59:40] <SkunkWorks> the power stage nowdays is def pwm. input to the servo drives can be a lot of things including step and direction__pwm__+/-10v
[16:00:20] <SkunkWorks> even digital data
[16:00:21] <Bo-Dick> so basically the interface from computer to stepper driver or servo driver is pretty much the same. the computer can't really tell the difference?
[16:01:08] <SkunkWorks> conventional - you would buy a servo pci card that outputs a +/-10 volt signal to the drives.
[16:01:13] <anonimasu> depdepends all on your hardware
[16:01:19] <anonimasu> yep
[16:01:44] <Bo-Dick> uuh. i don't really understand. are you saying the signal is analouge between computer and servo driver?
[16:02:49] <Bo-Dick> i mean how does a servo look like from the outside. does it take step and direction pulses just like stepper drivers does?
[16:03:34] <SkunkWorks> some take step and direction - some take +/- 10 volts - some take PWM siganl - some take digital data ....
[16:03:57] <anonimasu> the servo is just a normal dc/ac motor with good(GREAT) charachteristics..
[16:04:37] <anonimasu> and a encoder ofcourse..
[16:05:05] <rayh> SkunkWorks, Looks like the zircon series is a bit more money but takes ac direct.
[16:05:16] <rayh> We built a power supply for the Mazak drives.
[16:05:27] <SkunkWorks> rayh: was looking at thier site and saw that.
[16:05:44] <SkunkWorks> looks liek 32 amps max
[16:05:45] <rayh> I suspect that the 24 amp continuous zercon will handle your motors. 48 volt peak.
[16:05:58] <rayh> probably near $500.
[16:06:20] <SkunkWorks> mut it looks like the ac input version is ony good to 100w if I read it right
[16:06:45] <rayh> Add to that a Motenc lite or a Mesa m5i20 and you will have a rock solid machine.
[16:07:24] <SkunkWorks> I know - I would love to go servocard-amp direction also.
[16:07:29] <rayh> We were able to match speed and accel specs with the retrofit and original.
[16:07:54] <rayh> It is a bit of a step up.
[16:08:18] <SkunkWorks> are those servos direct drive?
[16:08:26] <SkunkWorks> to the ballscrews?
[16:08:55] <rayh> I'm thinking there was a gear in there someplace.
[16:09:38] <SkunkWorks> was the position feed back on the motor, ballscrew or external scales?
[16:10:13] <SkunkWorks> sorry for asking so many questions. I am like a sponge. :)
[16:10:37] <SkunkWorks> an annoying one at that.
[16:11:54] <rayh> jmk says
[16:11:58] <rayh> # 2000 cycles/rev * 4 counts/cycle * 1.6 gear ratio *
[16:11:58] <rayh> # 1.0 cm pitch * 2.54 cm/in = 32512 (tweaked later)
[16:12:49] <rayh> He is describing setting input scale for the mazak drives. It looks like a gear setup though mazak also used belts.
[16:13:31] <rayh> Also looks like the feedback on this was on the motor.
[16:13:31] <SkunkWorks> looks like the encoder was on the motor?
[16:14:16] <rayh> Some of the later horizontal mills had the encoder on the opposite end of the screw.
[16:14:46] <Bo-Dick> ok so there is no standard way of communicating with a servo drive from a computer. well is there a good/popular/usual way of doing the communication. btw, will the feedback reach all the way back to the pc or is the closed loop only inside the servo drive?
[16:17:03] <SkunkWorks> that is how our laser is - the encoder is on the oposite end of the ball screw
[16:17:19] <SkunkWorks> Rayh: have you heard of accupins?
[16:17:30] <SkunkWorks> (I might have asked you that)
[16:17:32] <rayh> Not by name.
[16:18:51] <jepler> Bo-Dick: With the exception of the (oddball, IMHO) step+direction servo drives, the loop is closed inside emc2 software.
[16:19:34] <SkunkWorks> this is the scales on our big maching - .1" diameter pins spaced .1" on center. A magnetic field is induced into it and "I think" a sin-cos signal is the result.
[16:20:25] <SkunkWorks> It devided each .1 pin down to .0001
[16:20:46] <SkunkWorks> somehow magicly with transister logic :)
[16:21:23] <rayh> I heard something about doing that only it was with precision ball bearing balls.
[16:23:02] <SkunkWorks> that was GE position feedback for thier controller
[16:25:55] <rayh> Is this on the K&T that you want to convert?
[16:26:04] <SkunkWorks> right
[16:26:15] <SkunkWorks> WOuld kind like to use it.
[16:26:41] <cradek> SkunkWorks: that sounds very cool, but I have no clue how it must work
[16:26:47] <rayh> With this sort of linear feedback you can't use the standard EMC backlash comp.
[16:26:52] <Bo-Dick> so the smart way to access a servo drive is to have a digital number in both directions to the servo driver.
[16:26:57] <cradek> SkunkWorks: well aside from "something to do with maxwell's equations"
[16:27:40] <rayh> maxwell reminds me I need coffee.
[16:27:44] <rayh> brb
[16:28:49] <SkunkWorks> you would not need any backlash comp would you? there would be some issue if there was slack between the servo and the scale - wonder how that would be handled.
[16:30:05] <SkunkWorks> Cradek: - this was a cadilac of a machine at the time - 60s. we have circuit diagrams and plot I think for the accupins. have not looked at them yet - if the output a simple sin-cos signal - a resolver to encoder circuit would work I would think.
[16:40:11] <SkunkWorks> then the thought would be - inner feedback loop between servo and drive (probably velocity) then and outer loop though emc using the linear scales.
[16:40:45] <SkunkWorks> I think that is how the machine is set up now ;)
[16:41:54] <rayh> We ran a test of linear scales some years back. The drive system had several thou backlash.
[16:42:11] <rayh> What would happen when you commanded a move is that the motor would wind up
[16:42:24] <rayh> during the lash
[16:42:29] <rayh> and then overshoot.
[16:42:38] <SkunkWorks> I can see that happening.
[16:42:39] <rayh> No good way to stop the oscillation.
[16:43:29] <SkunkWorks> hmm wonder how they do that in the current setup.. (there really might not be any backlash right now)
[16:43:46] <SkunkWorks> any as in not an issue./
[16:44:03] <SkunkWorks> I would not bet on it though.
[16:44:05] <rayh> I would think that with a little work we could separate the drive and pid stuff from position in hal.
[16:44:33] <rayh> Any commercial machine, even older ones have very little lash.
[16:45:44] <rayh> If you ran the pid loop from an encoder on the motor and position from the linear it should work.
[16:46:22] <SkunkWorks> it isn't like this is happening over night. :) BTW the ball screws in this thing are close to 3 inches in diameter
[16:46:49] <rayh> Yep. They built some strong machines.
[16:47:24] <rayh> I've got to be there when this retrofit fires up.
[16:48:04] <SkunkWorks> like I said - x/z/b are run with the same servo. so there is a nitemare of gearing to get the drive to z and b :)
[16:48:22] <SkunkWorks> Which will be nice to get rid of.
[16:48:29] <rayh> Oh that's right.
[16:49:06] <SkunkWorks> And it will be nice to have a full 3 axis machine
[16:49:26] <SkunkWorks> I mean it will be nice to have this machine full 3 axis
[16:49:31] <rayh> And even with b as index it will be very capable.
[16:49:43] <SkunkWorks> right
[16:50:19] <SkunkWorks> I am excited. It took to this point to see there there are now low cost solutions for conversion exp. with emc2
[16:50:44] <SkunkWorks> when we looked 15-20 years ago - it was a pretty penny.
[16:51:22] <rayh> and probably a first for m60
[16:52:25] <rayh> although I should have looked to see if the K&T test machine had pallets.
[16:53:29] <SkunkWorks> there was a k&t test machine?
[16:55:12] <rayh> It was the original NIST proof of concept. At GM powertrain in Detroit. Back in the mid 90's
[16:55:27] <SkunkWorks> wow - that is neat.
[16:56:03] <rayh> They used a split bus VME setup with dual processor cards. one for motion one io.
[16:56:21] <SkunkWorks> this is what it is supposed to look like :)
http://www.electronicsam.com/images/KandT/oldkandt.JPG
[16:56:21] <rayh> unfortunately the whole IO code got lost somewhere along the line.
[16:56:53] <rayh> Saw that. Nice ad image.
[16:56:54] <SkunkWorks> that sucks. I think with the computing power as it is now there is no real reason to separat the two
[16:57:35] <rayh> The dual door box was pretty full then.
[16:57:57] <rayh> Even the winchester drive took up a lot of space.
[16:58:52] <SkunkWorks> have not seen a winchester drive for a while. ;)
[16:59:35] <rayh> phone bbl
[17:12:28] <bill2or3> skunk, are you doing a conversion of a mill you allready have, or buying one to convert?
[17:14:23] <SkunkWorks> we already have it
[17:14:34] <SkunkWorks> had it for around 20 years I suppose
[17:15:02] <bill2or3> ahh.
[17:15:03] <SkunkWorks> http://www.electronicsam.com/images/KandT/DSCCurrent.JPG
[17:15:07] <bill2or3> * bill2or3 looks
[17:15:25] <bill2or3> oh yeah, I think I've seen that pic before.
[17:16:49] <Jymmm> You know youre in trouble when you mill comes wiht a built in step ladder
[17:17:15] <bill2or3> ha!
[17:17:43] <bill2or3> I did a little more work on my DIY mill. I think I'm going to be able to get it rigid enough.
[17:17:45] <bill2or3> * bill2or3 hopes.
[17:19:06] <SkunkWorks> putting tools in the tool changer is a pain without it ;)
[17:19:30] <Jymmm> lol
[17:20:26] <SkunkWorks> rigid is relitive. you will get this running - then use it to make parts for an even better one. I give you 3 months. ;)
[17:20:50] <SkunkWorks> it is neve ending
[17:20:57] <SkunkWorks> never
[17:24:07] <bill2or3> heh.
[17:24:09] <bill2or3> oh god no.
[17:24:31] <bill2or3> this one is taking me forever, I've got so many projects going I hardly get any time to work on it.
[19:14:35] <Bo-Dick> does anyone know how a controller looks like that can half-step and microstep a stepper motor?
[19:16:19] <SkunkWorks> half stepping is pretty easy. Micro stepping is quite a bit harder. I would think your setup could do half stepping - what is your circuit again?
[19:17:02] <Bo-Dick> it's taken from this design:
http://www.web-ee.com/Schematics/Stepper/stepper.gif
[19:18:32] <Bo-Dick> except i use bjt's instead of mosfets
[19:20:16] <SkunkWorks> hm - not very easy with that. when I was doing it I was controlling each phase from the printer port - so I could set any phase pattern I wanted - full, half
[19:20:52] <SkunkWorks> (long time ago)
[19:21:53] <SkunkWorks> I have seen circuit similar to that that run half stepping - (all logic chips) but finding them might be a problem again.
[19:22:19] <Bo-Dick> can microstepping be done through a h-bridge?
[19:24:16] <SkunkWorks> it can but the circutry need it to do it is quite intense - usually it is done with variing the current though the pwm. so in stead of the windings being on and off. they are off - 25% - 50% - 75% - on
[19:24:40] <SkunkWorks> or what ever division you want for the micro steps
[19:25:42] <Bo-Dick> so that way a kind of synthesized sine wave can be created
[19:25:48] <SkunkWorks> correct
[19:26:20] <Bo-Dick> the sick thing is that the least reliable mode is full step and the most reliable is microstep
[19:26:38] <SkunkWorks> right - usually how it works :)
[19:26:41] <Bo-Dick> it should be the opposite way according to common sense
[19:27:09] <Bo-Dick> a full step is very distinct in contrast to a microstep that is almost non-existant
[19:27:38] <Bo-Dick> how can one verify that the movement has actually occured through microstepping?
[19:29:50] <Jymmm> encoder
[19:30:07] <SkunkWorks> http://www.pminmo.com/l297-8/l297-8.htm you have seen this before - it does half stepping and it is pwm
[19:30:15] <Jymmm> It's blind faith... like when you flick a light switch on the wall, you expect there to be light.
[19:30:46] <SkunkWorks> you usually don't rely on the microstepping as being an exact postion.
[19:31:11] <Jymmm> 10 pulses == 10 steps (hopefully =)
[19:32:31] <Bo-Dick> lets say a system can microstep 1/8 of a full step. lets say that there are 200 steps/revolution. when full stepping that would make 100 pulses to complete half a revolution. when microstepping that would need 800 pulses.
[19:33:18] <Bo-Dick> so the full stepping is more likely to miss out steps?
[19:33:55] <Jymmm> microstepping is primarily used to help prevent resoance and smoother operation.
[19:34:30] <K4ts> hello
[19:34:33] <K4ts> hi les_w
[19:34:38] <Bo-Dick> that would kind of mean that when i microstep once i can be more sure that the motor has moved 1/8 step than i can be sure that it has moved 1 step in a full step. that's very weird
[19:35:52] <Jymmm> Bo-Dick did you look at that ebay link I gave you last night?
[19:36:05] <giacus_afk> giacus_afk is now known as giacus
[19:36:16] <Jymmm> Hi Anna
[19:36:22] <K4ts> hi Jymmm
[19:37:31] <Bo-Dick> uuh? ebay link?
[19:37:52] <Jymmm> Bo-Dick: Yes, I gave it to you twice last night. Check you logs.
[19:38:52] <Jymmm> (err once to the channel, and once to you directly that is)
[19:39:27] <Bo-Dick> i don't know how to check the logs
[19:39:43] <Bo-Dick> i found a "logs" directory in the mIRC directory and it was empty
[19:40:03] <Jymmm> Ah, you dont have logs enabled.
[19:40:26] <Bo-Dick> how do i do that?
[19:41:24] <Bo-Dick> ok i found it.
[19:41:38] <Bo-Dick> it was default off
[19:41:41] <Jymmm> Bo-Dick:
http://cgi.ebay.com/NEW-3-262oz-in-Single-Shaft-Bi-Polar-Stepper-Motors_W0QQitemZ7605335184QQcategoryZ78196QQcmdZViewItem
[19:41:48] <Bo-Dick> thx
[19:42:24] <Bo-Dick> three nice stepper motors. unfortunately 100$ each
[19:42:44] <Jymmm> AND drivers too
[19:43:17] <Bo-Dick> are they better than xylotex?
[19:43:37] <Jymmm> No clue, but they say almost in comparison to Geckos
[19:43:58] <SkunkWorks> as far as I know - xylotex drives do not do microstepping
[19:44:06] <Jymmm> Yes, they do
[19:44:12] <Jymmm> 8x
[19:44:17] <SkunkWorks> this seems to do it - 200 -400 -800 - 1600 steps
[19:44:30] <SkunkWorks> sorry - my mistake.
[19:44:42] <Jymmm> Xylotex is limited to 30V MAX
[19:44:50] <Jymmm> including BEMF
[19:45:29] <jepler> Seems like a 24V transformer is an easy size to get, and rectified that gives around 34V. Too bad for Xylotex.
[19:45:33] <Bo-Dick> if i didn't see wrong the xylotex was a four axis system. it costed 113$ for the driver and four motors. is that incredibly cheap or what?
[19:45:42] <Jymmm> but if you look at the website for that ebay link, they have drivers that have more features for like $10 more each
[19:45:58] <jepler> $113 with motors?
[19:45:59] <Jymmm> Xylotex 3 axis is $150
[19:46:02] <jepler> I thought xylotex was more than that.
[19:46:04] <Jymmm> no motors
[19:46:22] <Jymmm> 269 in/oz steppers are $50/each
[19:47:51] <Bo-Dick> to be honest i'll probably only need a three axis system
[19:48:41] <Bo-Dick> the fourth was though to be used for some kind of rotating movement
[19:49:10] <Bo-Dick> like milling the cogs for a sprocket
[19:51:13] <Bo-Dick> btw, does anyone know the details about this baby?
http://www.pminmo.com/l297-8/l297-8.htm
[19:51:42] <cradek> I run my mill with those
[19:52:02] <Bo-Dick> can they half-step, microstep?
[19:52:08] <cradek> halfstep
[19:52:24] <cradek> there's lots of information in the L297 and L298 datasheets, just search google
[19:52:59] <Bo-Dick> i'm particularly intrested in this design
[19:53:16] <Bo-Dick> what do they cost each?
[19:53:34] <cradek> the design is pretty much the reference implementation described in the datasheets, with a little input buffering etc.
[19:54:00] <jepler> the parts, excluding the circuit boards, are under $20 per axis.
[19:54:02] <Bo-Dick> it's bipolar right?
[19:54:04] <cradek> depends how many of the parts you have lying around, they are all commonly available (mouser.com etc)
[19:54:09] <cradek> yes bipolar
[19:54:40] <Bo-Dick> so this design is far cheaper than the gecko, xylotex, ............
[19:54:40] <cradek> jepler: are you sure? even the diodes are a little expensive iirc
[19:54:51] <jepler> cradek: Oh that's right -- I bought cut-rate 1A diodes
[19:55:09] <cradek> if your time is free and your junkbox is well stocked, these could be very inexpensive but good performers
[19:55:57] <Bo-Dick> is there any disadvantages with this driver. lets say you were the salesman for the geckos for example. what would be your argument to buy a six times more expensive geckodrive?
[19:55:59] <cradek> iirc, I run mine at 43V
[19:56:28] <cradek> the voltage handling is lower, the current handling is lower, there's no microstepping.
[19:56:37] <cradek> they're in an entirely different class.
[19:56:44] <Jymmm> and no mid-band resonance compensation
[19:56:46] <Bo-Dick> who cares if it's just as good?
[19:57:11] <cradek> who said it's just as good?
[19:57:16] <jepler> vishay ultra-fast 2.0 amp 100V PRV thru-hole diode UF4003/1 $0.13 each qty 1
[19:57:22] <Bo-Dick> if it works it works
[19:57:35] <cradek> all sorts of things work without being good
[19:58:08] <Jymmm> except dmess's 14yo =)
[19:58:10] <Bo-Dick> it would be like comparing a ferrari to a mazda
[19:58:24] <Bo-Dick> ok the ferrari is faster in extreme conditions
[19:58:36] <Bo-Dick> ok do i honestly need a ferrari? no
[19:58:43] <les_w> awww
[19:58:57] <jepler> oops, I mixed two lines
[19:59:05] <alex_joni> how about comparing a mazda to a bicycle
[19:59:22] <alex_joni> do you need a car? you'll get there by bike too
[19:59:24] <jepler> vishay ultra-fast 2.0 amp 100V PRV thru-hole diode EGP20B/1 $0.20 qty 1
[19:59:52] <Bo-Dick> so it's a matter of speed? are the L298 slower with their half-stepping?
[19:59:59] <jepler> (mouser.com catalog 625)
[20:00:07] <Jymmm> jepler heh
[20:00:23] <jepler> Jymmm: "heh" at which part exactly?
[20:00:23] <Jymmm> jepler shipping $82.50 =)
[20:00:38] <alex_joni> Bo-Dick: not only speed, but eventually motor speed you can get
[20:00:40] <Bo-Dick> what do i get from the geckos that the L298 can't give? except that the geckos might be 50% faster and stronger so they can handle a monster mill.
[20:00:48] <Jymmm> jepler you posting the link
[20:01:01] <alex_joni> Bo-Dick: you might only be able to run motors up to 10 IPM with the L298
[20:01:10] <jepler> Bo-Dick: gecko drive will give you higher supply voltage (up to 80V); higher current; microstepping; and the mythical mid-band resonance damping
[20:01:11] <alex_joni> but the same motors up to 30IPm with geckos
[20:01:34] <alex_joni> Bo-Dick: you know you can drive a stepper motor with various voltages?
[20:01:41] <jepler> Bo-Dick: higher supply voltage means more high-speed torque (because you can reach the peak current more quickly)
[20:01:44] <alex_joni> the higher the voltage the better the max-speed
[20:01:45] <Bo-Dick> so the comparison between mazda and ferrari wasn't so inaccurate after all
[20:02:10] <alex_joni> Bo-Dick: then there's microstepping, which smooths out LOTS of things
[20:02:22] <Bo-Dick> ferrari is faster (unnecessary faster for normal life situations) and a lot more expensive
[20:02:42] <alex_joni> for example: if the steps sent from the PC aren't evenly spaced, then the L298 driven motor might stall
[20:02:55] <alex_joni> with the geckos you'll have a chance of getting away with that
[20:02:59] <Bo-Dick> i guess the geckos are quiter also. i don't care if theyre noisy
[20:03:32] <alex_joni> it's not a matter of quiet/noisy.. cutting will probably be lots noisier
[20:03:46] <Bo-Dick> well if the L298 is unreliable that changer matter a lot. it's like comparing a reliable car to one that might stop on the road.
[20:03:57] <alex_joni> it's simply up to you.. if you need a low-end solution, get the L297/298
[20:04:06] <alex_joni> Bo-Dick: I did say bike
[20:04:44] <alex_joni> if you're not satisfied by it.. get some geckos (which are really spicy priced, but they all say it's worth it)
[20:04:45] <jepler> l298 is very reliable
[20:04:49] <Bo-Dick> the bottom line is: if it's slow and noisy, thats fine. if it's unreliable that really sucks
[20:05:07] <alex_joni> jepler: the driver by itself is reliable
[20:05:17] <cradek> l297/l298 are venerable chips, there's nothing wrong with them
[20:05:34] <cradek> they're a good way to halfstep a bipolar motor at moderate voltages
[20:05:42] <alex_joni> I was thinking PC-generated pulses with jitter + l298 is less reliable than the same + gecko (with microstepping)
[20:05:54] <jepler> alex_joni: in practice, cradek's mill never loses position
[20:06:01] <Bo-Dick> i don't remember if the L298 implemented so called compensated half stepping?
[20:06:06] <cradek> sure, they are not as good, but still perfectly fine for moderate speeds
[20:06:14] <jepler> Bo-Dick: it can, but the pminmo design doesn't.
[20:06:29] <alex_joni> Bo-Dick: what's the mill cost?
[20:06:33] <Bo-Dick> if that is the situation i'll definitely buy the L298
[20:06:58] <cradek> build one and try it, build the rest if you like it
[20:07:11] <alex_joni> if it's < 1000$ then the L297/298 should be ok
[20:07:14] <cradek> that's what I did, it's a small investment
[20:07:53] <Bo-Dick> it looks simple to build also. no surface mounted devices
[20:08:39] <jepler> Bo-Dick: page 13 of this document shows how to add compensation to the half-step position:
http://www.st.com/stonline/products/literature/an/1679.pdf
[20:08:48] <Bo-Dick> the only real problem that i have is that i don't have any possibility to create the PCB boards for it.
[20:09:05] <jepler> it consists of one logic gate, one transistor, and 2 resistors per axis
[20:09:25] <cradek> you could handwire it using perfboard, just use fat wires where the traces are fat
[20:09:37] <cradek> it will be a lot of work
[20:09:39] <jepler> the l298 pins are not on .1" centers
[20:09:55] <cradek> hmm
[20:09:57] <alex_joni> jepler: but they are long enough to allow bending
[20:10:00] <Bo-Dick> the fine thing about the h-bridges are that they are purposely designed to switch and have pwm current limiting built in. my bjt darlington transistor bridges sucks so hard...
[20:10:00] <cradek> I didn't think of that
[20:10:05] <SkunkWorks> http://www.pminmo.com/l297-8/L297_8HVschematic.pdf <- that has a half stepping jumper it looks like
[20:10:29] <cradek> yes his design is jumper selectable, but you will always use halfstepping
[20:10:47] <cradek> on my machine fullstepping worked badly
[20:11:10] <Bo-Dick> it'll be piece of cake compared to what i've done so far with my non-successful design.
[20:11:44] <cradek> I bet alex is right and you could stick an L298 into .1" perfboard
[20:12:35] <Bo-Dick> you know what? i've spent 80$ on my non-successful crappy design. i could've bought four of these L298 designs for that money.
[20:12:38] <Bo-Dick> holy crap
[20:13:20] <Bo-Dick> i'm starting to give up on that construction
[20:13:31] <alex_joni> Bo-Dick: don't feel bad
[20:13:32] <cradek> I suggest you immediately cut your losses and call it a learning experience
[20:13:35] <alex_joni> we all have been there
[20:13:40] <cradek> then move on and make something better
[20:13:45] <cradek> yes we have
[20:13:55] <SkunkWorks> more than once.
[20:13:56] <alex_joni> we all have tried to build something, and failed in the beginning
[20:14:01] <bill2or3> heh.
[20:14:07] <alex_joni> but eventually we learned, then we moved on
[20:14:08] <bill2or3> usually more than once, for me.
[20:14:18] <cradek> yeah you only failed once?
[20:14:19] <alex_joni> can't say for the others, but I wouldn't go there again now
[20:14:28] <alex_joni> it was fun though
[20:14:32] <alex_joni> cradek: not really :D
[20:14:36] <Bo-Dick> btw, i tried to implement a current limiter today that worked for 20 volts. i adapted it to work with 50 volts and it worked for a couple of seconds. then i blew up. it virtually exploded.
[20:14:52] <bill2or3> explosions are cool.
[20:14:53] <cradek> iT blew up, I hope
[20:14:59] <alex_joni> I remeber building a DC servo drive, I wasted about 20 pcs. IR2111 and a bag full of MOSFET's
[20:15:36] <alex_joni> eventually I got it right.. then my PCB acted as a fuse :D
[20:15:54] <alex_joni> the traces I had couldn't handle 20Amps
[20:15:55] <SkunkWorks> I still want to build a high power dc servo drive - alex - don't descurage me ;)
[20:16:15] <alex_joni> SkunkWorks: as I said, I got it right in the end
[20:16:25] <Bo-Dick> i still have no idea why my PNP TIP32C transistor blew up!
[20:16:37] <alex_joni> with encoder feedback, and some very limited PID back then ;)
[20:16:40] <Bo-Dick> it's rated 100V in the datasheet for gods sake!
[20:17:18] <alex_joni> this is the project I hassled a lot with:
http://dsplabs.cs.utt.ro/~juve/yanor/
[20:19:24] <Bo-Dick> there is one more important detail. i modified the stepper motors so i could run them bipolar. i had to take them apart and resolder them inside. what do you know! what did i hear today? they loose 85% of the performance when messing with the magnetic field. they can't be disassembled without detroying the magnetic properties.
[20:19:49] <bill2or3> oops.
[20:19:50] <Bo-Dick> now was that the last thing i needed?
[20:20:11] <Bo-Dick> when things are already problematic regarding the stepper driver
[20:20:11] <alex_joni> Bo-Dick: no, the last thing you need is you doing that more than once
[20:20:57] <Bo-Dick> i modified four motors. the only four i had that is. i couldn't dream of that they would be ruined for taking them apart.
[20:21:32] <Bo-Dick> so they were magnetized when the rotor was already in place
[20:21:48] <cradek> I would need some more data to be convinced of that figure.
[20:21:49] <Bo-Dick> if i would have known that before i took them apart
[20:22:48] <Bo-Dick> well to be honest. when i reassembled them again they could more easily be rotated. the cog feeling was almost gone.
[20:22:50] <alex_joni> generally, it's bad to take apart any motor
[20:22:58] <cradek> hmm.
[20:24:41] <Bo-Dick> so i'm back where i started! but with less money and a little more knowledge
[20:24:53] <alex_joni> Bo-Dick: seems like a fair deal
[20:26:51] <Bo-Dick> here are the greatest mistakes ive done in order of significance. 1) never take a stepper apart. 2) full step isn't the best mode it's the worst. 3) it's better to implement one axis per board rather than tryin' to implement a multi axis system at once for a simple reason. i can test is if it's good before i redo all the job for the other axes.
[20:27:43] <SkunkWorks> and PWM for the win.
[20:27:49] <Bo-Dick> regarding 1) and 2) you simply have to know about it because they can't be derived from common sense. however that i overlooked the 3) is a disgrace. i was stupid simply!
[20:28:27] <bill2or3> I've found the best thing to do is just not tell anyone when I do that, and move on. :-)
[20:28:45] <cradek> haha
[20:28:55] <Bo-Dick> i've got nothing to hide. i've been an asshole simply
[20:28:59] <SkunkWorks> http://www.alltronics.com/stepper_motors.htm
[20:29:22] <SkunkWorks> 7.95 - 60 in-oz bipolar
[20:30:22] <bill2or3> hmm
[20:30:27] <Bo-Dick> the whole thing started with that i got a stepper motor from a junked old printer. then i got greedy
[20:30:29] <bill2or3> pretty light
[20:30:42] <bill2or3> finding steppers isn't too bad, it's the controllers that are difficult.
[20:30:44] <Bo-Dick> hey, one could make a cnc from this
[20:31:24] <SkunkWorks> bill2or3: it is better than he has now ;)
[20:31:27] <Bo-Dick> first i though of floppy driver stepper controller. when i testran them i discovered that the motors were ridiciously weak.
[20:32:05] <Bo-Dick> hmmm. i started to read up on full-step, half-step unipolar and bipolar and so on.
[20:32:08] <bill2or3> yeah, floppy read-heads aren't that heavy.
[20:32:35] <Bo-Dick> after some research i found this design:
http://www.web-ee.com/Schematics/Stepper/stepper.gif
[20:33:30] <Bo-Dick> which energized the coils at 100% all the time and according to what i've read up on the subject that was the strongest mode one could find.
[20:34:20] <alex_joni> Bo-Dick: some designs use full stepping, but alway energize 2 coils
[20:34:30] <alex_joni> doesn't work with any motors though
[20:34:30] <SkunkWorks> "wave"
[20:34:33] <bill2or3> bo, are you doing a conversion of an existing mill, or what?
[20:34:37] <Bo-Dick> the only apparent disadvantage with that design was that it had not the finer resolution but i though that 100 steps/revolution would be more than good enough
[20:35:10] <Bo-Dick> in fact i'm working on a lathe where i plan to use the crossslide so i can arrange it to a drillpress.
[20:35:23] <Bo-Dick> a drillpress with an x-y table is a mill right?
[20:35:37] <cradek> for as long as the bearings hold out, yes
[20:35:41] <bill2or3> basicially.
[20:35:58] <Bo-Dick> assuming there is one motor for the pressing movement that makes up the third axis
[20:35:58] <bill2or3> although a mill has a better spindle
[20:36:07] <bill2or3> yes, the 'Z'.
[20:36:38] <Guest184> Hi All
[20:36:39] <Bo-Dick> another advantage i saw was that i could use these steppers to wind coils for example guitar pickups.
[20:37:03] <cradek> hi Guest184
[20:37:08] <SkunkWorks> http://www.electronicsam.com/video/MVC-345W.MPG :)
[20:37:14] <bill2or3> funny you should mention that, I've been thinking the same thing, since I need to make a small coil.
[20:38:06] <Bo-Dick> SkunkWorks: that looked like a drill-chuck
[20:38:18] <Bo-Dick> it it a converted drill-press?
[20:39:27] <alex_joni> hello
[20:39:41] <SkunkWorks> it was 2 axis (manual z)
[20:39:55] <SkunkWorks> It was to sell those steppers on ebay - it really helped ;)
[20:40:09] <SkunkWorks> yes it is a cheap drill press.
[20:40:25] <Bo-Dick> manual z works fine if you could have a stop on the z axis to a certain depth
[20:41:03] <Bo-Dick> which i assume you have
[20:41:40] <Bo-Dick> how do you handle that in the software? you have to get a signal that says "lower the drill now" or somethin'
[20:42:07] <SkunkWorks> you could. that is how some people do it with an M00
[20:42:10] <cradek> Bo-Dick: you would have to pause
[20:42:24] <Bo-Dick> you know what? that is soo smart!
[20:42:26] <cradek> Bo-Dick: then you just hit continue when it's ready (that's how I change tools)
[20:42:41] <Bo-Dick> thats awsome!
[20:42:46] <cradek> haha
[20:42:59] <cradek> I thought you were being sarcastic but you're not :-)
[20:43:04] <Bo-Dick> you could pause to set another z-limit as well!
[20:43:39] <SkunkWorks> but a full 3 axis machine is much nicer :)
[20:43:51] <Bo-Dick> of course!
[20:44:09] <Bo-Dick> but a manual z is a powerful compromize
[20:44:29] <SkunkWorks> http://www.electronicsam.com/video/VIDEO1.mpeg
[20:44:34] <cradek> yes for 2.5D work you could get by and still have some advantages over a full manual machine
[20:44:43] <Bo-Dick> but for advanced 3 dimensional objects a three axis system is a must of course
[20:45:00] <cradek> like cutting angles, circles, etc
[20:45:06] <SkunkWorks> shows the press a little better. ^
[20:46:13] <cradek> cool, yeah, like that
[20:47:30] <Bo-Dick> and this is done with the L298 board?
[20:48:00] <SkunkWorks> :) no that was done with some nice compumotor microstepping drives.
[20:48:32] <bill2or3> what is it making in that video?
[20:48:32] <SkunkWorks> I had given up on making my own driver a long time ago.
[20:48:49] <anonimasu> I ran manual z before.. it's a hell.. :)
[20:49:27] <SkunkWorks> nothing - it was just to demo the stepping motors to sell on ebay. (made people thing "hey I want to do that")
[20:49:39] <bill2or3> ahh.
[20:50:09] <SkunkWorks> (used a cheap vice and drill press)
[20:50:46] <Bo-Dick> do you think i could achieve the same result with the L298 driver?
[20:50:59] <cradek> easily
[20:51:00] <SkunkWorks> for those speeds - yes - just ask cradek
[20:51:02] <bill2or3> probablly.
[20:51:22] <cradek> Bo-Dick:
http://timeguy.com/cradek/cnc
[20:51:30] <SkunkWorks> cradek - what is the top speed of your machine right now?
[20:51:34] <cradek> Bo-Dick:
http://timeguy.com/cradek/cnc/pcb
[20:52:01] <cradek> SkunkWorks: in XY it's 32ipm with 16tpi leadscrews, I often cut at 20ipm
[20:52:28] <cradek> it's very powerful at those speeds
[20:52:42] <SkunkWorks> nice. The shaft cuplings in the videos are air hose ;)
[20:52:50] <SkunkWorks> worked well and hose clamped
[20:52:52] <cradek> I saw that - very creative
[20:53:32] <SkunkWorks> we got a good deal on the steppers so we where selling them 3 at a time on ebay.
[20:53:35] <bill2or3> that's good motivation for me.
[20:54:22] <Bo-Dick> is it controlled from the pc's parallel port?
[20:54:31] <cradek> yes
[20:55:20] <cradek> plus spindle encoder feedback and spindle on/off are on the same parallel port
[20:55:29] <cradek> emc2 is very flexible in this way
[20:55:42] <SkunkWorks> emc2 ROCKS!!!
[20:56:11] <cradek> I sure like how it works for me, the new threading is especially cool
[20:56:13] <Bo-Dick> did the original version really have ballast resistors to limit current? :S
[20:56:26] <cradek> mine? definitely, it came from maxnc that way
[20:56:31] <cradek> it worked very badly
[20:56:56] <bill2or3> will emc2 let me compensate for poor construction of my milling machine?
[20:56:58] <SkunkWorks> cradek - did you buy that new?
[20:57:09] <Bo-Dick> you know what? my crappy crap design didn't even use resistors for current limiting. it was at least though to be used with linear current limiters.
[20:57:10] <cradek> SkunkWorks: many years ago, yes
[20:57:31] <cradek> bill2or3: only a little bit, unfortunately
[20:58:11] <cradek> Bo-Dick: this mill came with four transistors per motor with ballast resistors bolted to a piece of aluminum with a fan blowing on it
[20:58:12] <bill2or3> too bad, that means I'll have to actually do a good job.
[20:58:17] <Bo-Dick> the original stepper drivers must've been crap
[20:58:42] <cradek> Bo-Dick: I made useful parts with them, but it was slow going, about a third or fourth of the performance I have now.
[20:59:20] <cradek> also the leadscrews were regular allthread in brass nuts, so there was no provision for adjusting backlash
[20:59:39] <bill2or3> wow.
[20:59:44] <SkunkWorks> cradek - what did your replace them with?
[21:00:05] <cradek> acme thread with spring-loaded anti-backlash nuts
[21:00:10] <SkunkWorks> nice.
[21:00:16] <cradek> not sure there's a picture of those yet
[21:00:37] <Bo-Dick> whats the pitch of the leadscrew threads?
[21:00:50] <cradek> 16 in XY, 20 in Z (still the original)
[21:01:17] <cradek> if you come to the cnc workshop, you can see it :-)
[21:01:20] <Bo-Dick> do you mean 16 threads per inch?
[21:01:23] <cradek> yes
[21:01:32] <cradek> although I'm sure there will be nicer machinery to ogle
[21:02:02] <SkunkWorks> rigid tapping?
[21:02:04] <SkunkWorks> :)
[21:02:19] <cradek> I would probably have that done already, except my spindle doesn't reverse
[21:02:27] <Bo-Dick> it's gettin' late. have to go now. thanks for all help and advices!
[21:02:32] <cradek> bye Bo-Dick
[21:02:34] <bill2or3> good luck bo.
[21:02:39] <SkunkWorks> mechanical - or it doesn't at all?
[21:02:44] <cradek> electrical
[21:03:03] <cradek> I mean the motor control is just on/off
[21:03:17] <cradek> I guess I could turn it off, then backward by hand
[21:03:19] <cradek> hmm
[21:03:24] <SkunkWorks> hmmm
[21:03:27] <cradek> that would probably work good enough to get it going
[21:03:33] <bill2or3> a guy I know just got a job here: radiusengineering.com I hate him now.
[21:03:34] <bill2or3> lots
[21:04:01] <cradek> we've had a lot of Guests today, but none have said anything
[21:04:22] <alex_joni> Guest184 said hello
[21:04:25] <jepler> cradek: what happens in the planner if you accidentally turn the spindle the wrong way? Will it ferror, or move XZ in the wrong direction?
[21:04:27] <alex_joni> but that's about it :)
[21:04:47] <cradek> jepler: I'm not sure, but I bet there are bogons
[21:05:16] <jepler> I'll look forward to seeing a commit message with your fix for that.
[21:05:31] <cradek> I haven't quite thought it all through yet
[21:06:16] <alex_joni> where are the bogons?
[21:06:26] <jepler> do you use a negative K- (F-) when reversing, or is it the same K- (since both directions are reversed)? I guess I feel like I've answered my own question now...
[21:06:31] <alex_joni> * alex_joni has a shield against those..
[21:06:47] <cradek> jepler: that's the kind of thing I haven't thought through
[21:07:00] <SkunkWorks> cradek: why not?
[21:07:01] <SkunkWorks> :)
[21:07:24] <cradek> too many distractions, no cvs, fighting on the lists, etc.
[21:07:42] <SkunkWorks> fighting on the lists? what did I miss?
[21:07:43] <cradek> and that I'd have to hack my hardware some more to run it
[21:07:56] <SkunkWorks> * SkunkWorks gets some popcorn
[21:07:59] <cradek> haha
[21:08:08] <cradek> it's not worth wasting too many brain cells on
[21:08:25] <cradek> a nice thing is we have a new developer today, he already sent a bugfix patch
[21:08:28] <alex_joni> cradek: it's probably best if you don't have any at all
[21:08:33] <alex_joni> then you might understand better
[21:08:36] <SkunkWorks> well sourceforge seems to be keeping the online list up to date - so I can look for my self
[21:09:20] <alex_joni> cradek: seems the IRC client is usefull afterall :)
[21:09:32] <cradek> oh is that the Guests?
[21:09:36] <cradek> cool!
[21:09:37] <alex_joni> yeah
[21:09:53] <alex_joni> any who has the "Visitor from www.linuxcnc.org" on the quit message
[21:10:11] <alex_joni> oh my.. my grammar is really bad tonight
[21:10:35] <cradek> no worse than all us americans
[21:11:09] <alex_joni> it used to be better than this
[21:11:26] <cradek> maybe it's bedtime
[21:11:35] <alex_joni> indeed it is..
[21:11:37] <alex_joni> good night all
[21:11:43] <cradek> goodnight
[21:11:51] <SkunkWorks> I have to think up a snappy quit message. maybe "all your bases are belongs to us"
[21:11:54] <SkunkWorks> night
[21:12:03] <alex_joni> SkunkWorks: lol
[21:12:14] <SkunkWorks> :)
[21:13:12] <SkunkWorks> I don't know how many people would get that
[21:13:30] <bill2or3> done to death.
[21:15:18] <SkunkWorks> * SkunkWorks never actually played the game
[21:15:22] <rayh> see you alex.
[21:16:56] <cradek> LawrenceG: hi, have you tried your cvs login yet?
[21:26:02] <SkunkWorks> bbl
[21:33:02] <jepler> http://blog.modernmechanix.com/2006/04/05/an-automatic-machine-tool/
[21:33:20] <jepler> An Automatic Machine Tool
[21:33:22] <jepler> Feedback control has begun to advance in the working of metals. Presenting the first account of a milling machine that converts information on punched tape into the contours of a finished part.
[21:33:26] <jepler> [1952]
[21:34:37] <jepler> this is neat .. scans from an old SciAm article plus text
[21:36:52] <jepler> interesting. It's an American magazine, but to me some of it reads as britishisms: 'The cross slide moves the head back and forth across table', not 'the table'.
[22:03:20] <jepler> hm, I didn't mean to kill the conversation
[22:04:45] <LawrenceG> cradek: sorry... had network unhooked while trying to keep a windows pgm in the sandbox!
[22:05:00] <LawrenceG> cradek: no, I havent tried cvs yet
[22:05:24] <cradek> no hurry, just wondered
[22:05:37] <LawrenceG> will try it now...
[22:06:24] <cradek> you can commit to /documents/scratch.txt if you just want to try something
[22:08:43] <LawrenceG> its asking for a password.... blank doesnt work???
[22:09:28] <cradek> it should not ask for the password if the ssh keys are right
[22:09:38] <cradek> are you on the machine corresponding to the key you sent?
[22:09:42] <LawrenceG> cradek: cvs -z5 -d:ext:
[email protected]:/cvs co emc2
[22:09:45] <LawrenceG> yep
[22:10:07] <cradek> try lawrenceg, not LawrenceG
[22:10:13] <LawrenceG> ok
[22:10:22] <cradek> (just a guess)
[22:10:28] <jmkasunich> mixed case in username alwats causes confusion
[22:10:40] <LawrenceG> Yea! working
[22:10:46] <cradek> whee
[22:10:53] <jmkasunich> I used to use John as a user name on my linux boxes, then I wised up
[22:11:13] <jmkasunich> alwats? how bout always....
[22:11:29] <cradek> I've never seen mixed case usernames before, it never crossed my mind
[22:11:36] <LawrenceG> not bad for speed, a steady 40k bytes or so... done
[22:12:37] <LawrenceG> nice work guys.... even though there has been a certain amount of "discussion"....
[22:12:45] <cradek> thanks
[22:12:52] <rayh> I'm trying to get the cvs from a vnc in another box and it refuses my passwd.
[22:12:58] <cradek> I think it'll be fine once everyone settles down
[22:13:23] <LawrenceG> anyone active on this forum was very aware of the problems
[22:13:29] <cradek> rayh: you probably have a different ssh key there. you can't use a password. you have two choices to fix it:
[22:13:52] <rayh> Ah. Right I didn't make a public key there.
[22:13:52] <cradek> copy your .ssh key (you can copy the whole .ssh directory) to the other machine
[22:14:00] <cradek> or send me a second key, you can have any number of them
[22:14:16] <cradek> or if you don't need to commit, just use anon
[22:14:22] <K4ts> night
[22:14:23] <cradek> three, three choices
[22:14:25] <rayh> I still don't have ssh into that machine.
[22:14:26] <cradek> haha
[22:14:35] <LawrenceG> cradek: can you send me the key to some knickers?
[22:14:45] <rayh> so I'll make a new there and send the result to you.
[22:15:00] <rayh> thanks
[22:15:12] <LawrenceG> ok, I'll be quiet
[22:15:13] <cradek> rayh: your private key is just ascii, you can even copy and paste it
[22:15:54] <jmkasunich> one long ling of gibberish
[22:15:55] <jepler> but don't send your private key to cradek
[22:16:10] <jmkasunich> right, public key only
[22:16:19] <cradek> yeah, I get the public key, you use the private one yourself (hence the name private)
[22:17:04] <skunkworks> jmkasunich:
http://www.electronicsam.com/images/KandT/DSC_0242.JPG
[22:18:25] <bill2or3> I have those same cheapie calipers.
[22:19:11] <skunkworks> they work. I am little harder on them than the good ones.
[22:19:29] <jmkasunich> beefy
[22:19:49] <bill2or3> I'm sure they're at least as good as my cheapie lathe. :-)
[22:21:45] <skunkworks> http://www.electronicsam.com/images/KandT/servotag.JPG
[22:22:28] <jmkasunich> radians per second? don't see that often
[22:22:47] <jmkasunich> about 1200 RPM if I did the mental math right
[22:23:19] <skunkworks> that is in the tach section though - I was a little confused. It is like it is the rating for the tach.
[22:24:38] <skunkworks> that would be 400 inches per minute. I could live with that>
[22:25:52] <jmkasunich> I assume they didn't put a 1200RPM tach on a 3000RPM motor ;-)
[22:42:35] <skunkworks> :)
[22:55:52] <skunkworks> jmk - can you explain how you calculated that? I swear I am usually smarter than this. ok as I was typing this (125/(2pi))*60
[23:00:09] <cradek> are you asking about converting radians per second to degrees per second?
[23:00:22] <skunkworks> rads per second to rpm
[23:00:32] <skunkworks> It came to me.
[23:00:37] <cradek> ok :-)
[23:00:38] <skunkworks> finally
[23:01:22] <cradek> units '1200 radians/sec' rpm
[23:01:34] <cradek> * 1193.6621
[23:02:23] <cradek> if you don't want to bother figuring it out, just use units
{kind=link}
{kind=link}
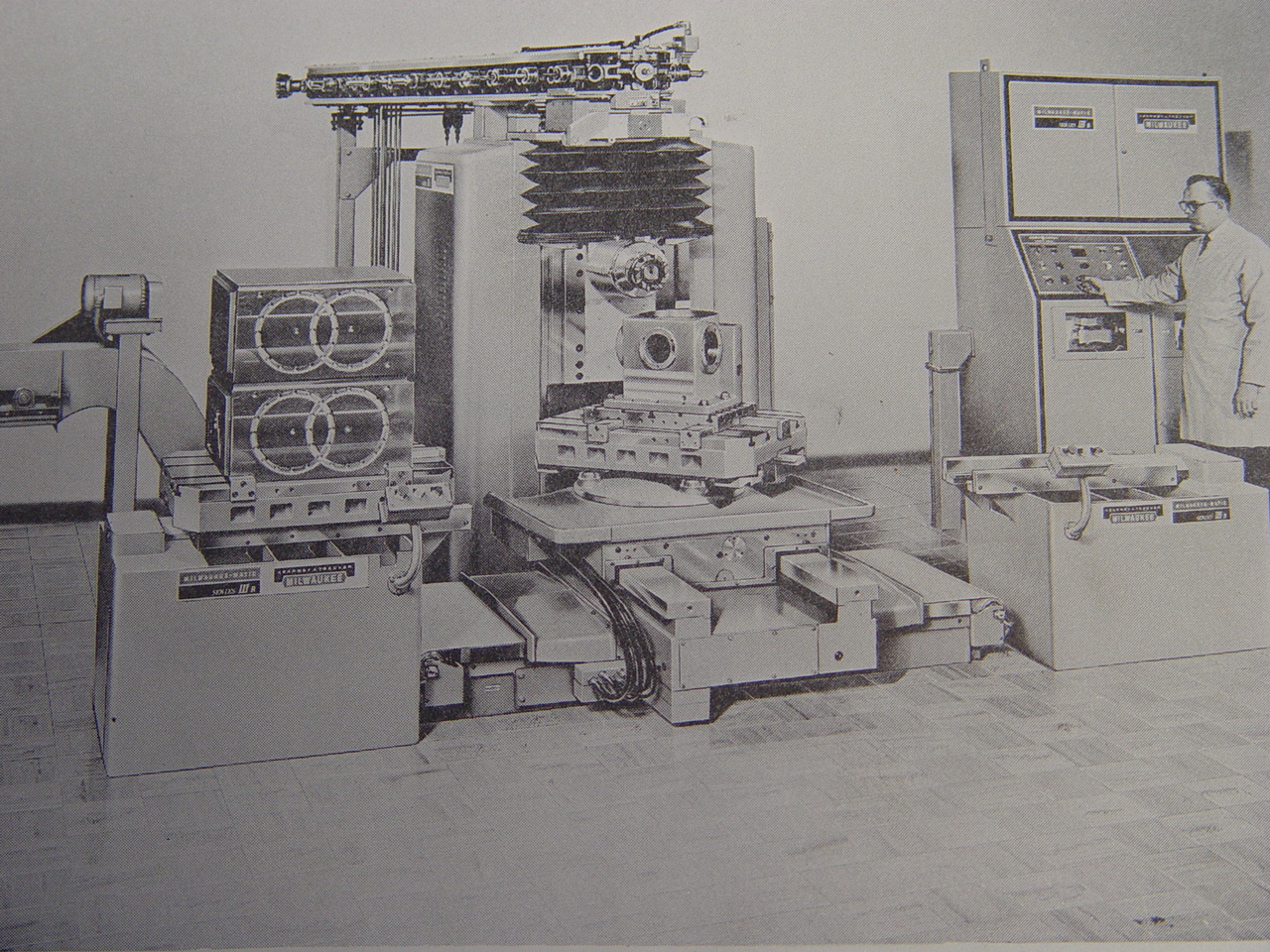{kind=link}
{kind=link}
{kind=link}