Back
[00:04:14] <A-L-P-H-A> zeeesh... sheet metal takes effort to measure, align and rivet
[00:04:26] <A-L-P-H-A> not I gotta drill out holes to be larger. :(
[01:27:49] <CIA-8> 03jmkasunich 07HEAD * 10infrastructure/farm-scripts/index.shtml: removed rcslib and emc1 from compile farm, fixed up some inaccurate text
[01:37:23] <skunkworks> jmkasunich: got a second? I need to pick your brain. For the last time regarding mosfets I hope.
[01:37:34] <jmkasunich> go ahead
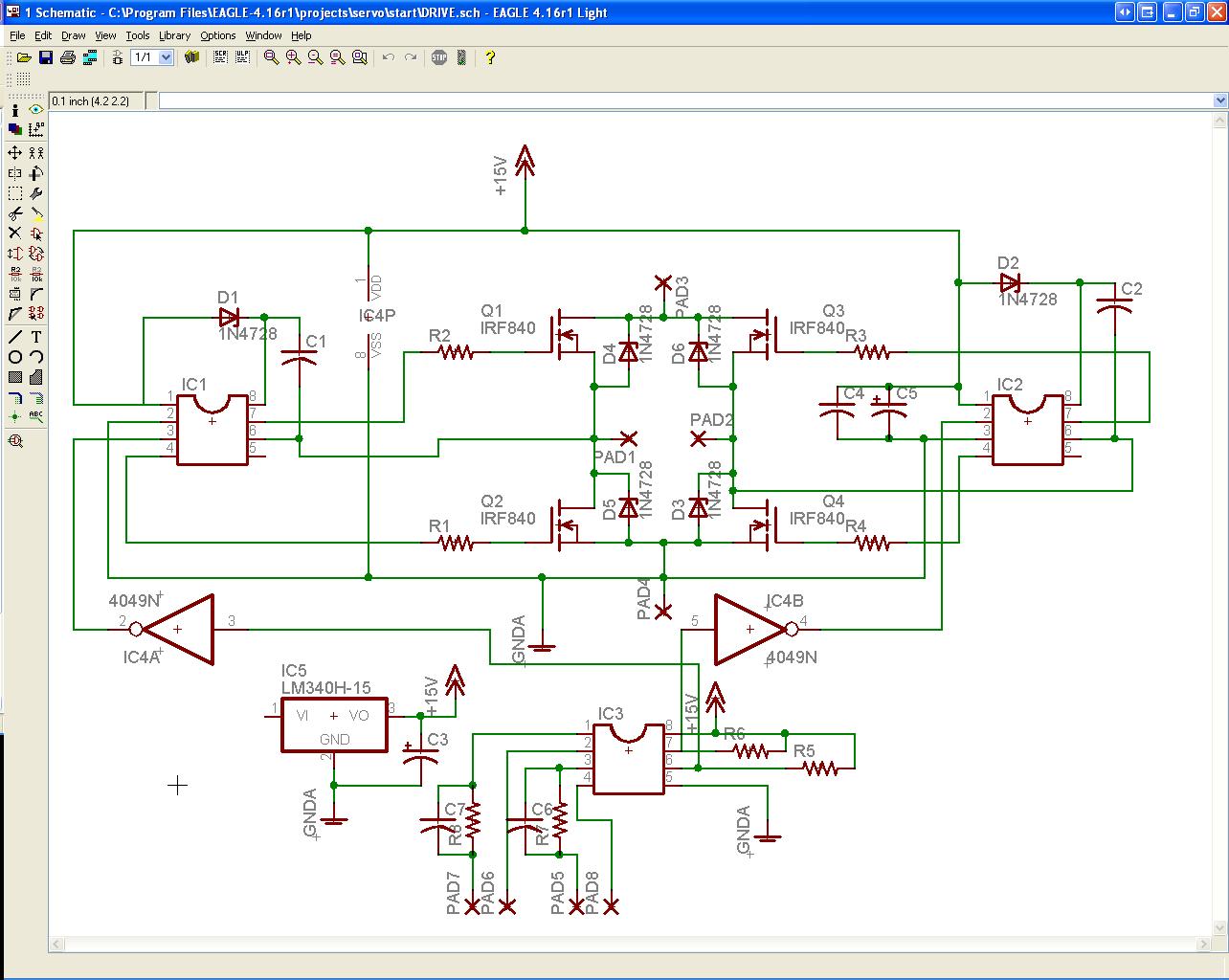
[01:37:56] <skunkworks> do you remember my inital circuit using 2 ir2111 and 4 mosfets
[01:38:07] <jmkasunich> not in detail
[01:38:21] <jmkasunich> ls
[01:38:27] <jmkasunich> oops
[01:39:01] <skunkworks> http://www.electronicsam.com/images/KandT/eaglesch.JPG
[01:39:35] <jmkasunich> ok
[01:39:44] <jmkasunich> what is a 1N4728?
[01:39:52] <jmkasunich> rated current? switching speed?
[01:40:39] <skunkworks> damn it - don't go by the componants. they are not actual
[01:40:44] <skunkworks> sorry
[01:41:03] <jmkasunich> well, what are you useing for freewheel diodes?
[01:41:15] <jmkasunich> they should be rated for the motor current, and be fast
[01:41:55] <jmkasunich> anyway, thats a digression, what was your real question?
[01:43:03] <skunkworks> trying to find the specs - They are 60 amp 600v high speed.
[01:43:11] <skunkworks> "high speed" :)
[01:44:50] <jmkasunich> sounds good
[01:44:54] <skunkworks> I want to use a .01 ohm current sense resister - at 50 amps that is .5 volt drop. I don't see that as issue for the "on" voltage for the low side fets because it uses the vcc which will be 15v. Do you see any other issues.
[01:45:31] <jmkasunich> what is the rated current of the drive?
[01:45:55] <skunkworks> the max I would run is 40 amps or so.
[01:46:45] <jmkasunich> and what are you using the current feedback for?
[01:46:54] <jmkasunich> control, or just overcurrent protection?
[01:47:34] <skunkworks> .01 ohm resister -> comparater -> 'and' gate or equivelent -> input of the ir2111
[01:48:05] <skunkworks> does that make sense?
[01:48:21] <skunkworks> over current protection
[01:48:30] <jmkasunich> that doesn't answer the question - are you going to be comparing it to some current command and actively controlling the current that way, or are you comparing it to some overcurrent trip level and using it just to protect against overcurrent?
[01:49:06] <skunkworks> just over current protection
[01:49:28] <jmkasunich> the biggest issue will be noise
[01:49:54] <jmkasunich> dI/dT times the inductance of the resistor might generate spikes significantly over 0.5 volts, and give you false trips
[01:50:10] <jmkasunich> also, you might want to latch it, at least for one PWM period
[01:50:22] <skunkworks> I figured I would need some sort of filtering. I was plaining on looking at similar circuits
[01:51:06] <jmkasunich> otherwise you could get into an oscillation - current gets too high, comp turns off driver, fet turns off, current drops, comparator turns driver back on, fet turns on, current is still too high, repeat until smoke
[01:51:33] <skunkworks> I see.
[01:51:58] <jmkasunich> if you don't need a precise trip leve, I'd think about using a small NPN transistor
[01:52:06] <jmkasunich> emitter tied to bottom of sense resistor
[01:52:14] <jmkasunich> base tied to top thru maybe 1K or so
[01:52:22] <jmkasunich> small filter cap from base to emitter
[01:52:50] <jmkasunich> collector pulled up to +5 with a fairly large resistor, and a cap from there to ground, maybe 0.01uF or so
[01:53:16] <jmkasunich> when the voltage across the sense resistor exceeds 0.6V, the transistor turns on and discharges the 0.01uF cap
[01:53:29] <jmkasunich> the resistor should be high enough that it takes several milliseconds to recharge
[01:54:57] <jmkasunich> does that make sense?
[01:55:00] <skunkworks> interesting. so when I over current - I get an off time delay of a few ms
[01:55:05] <jmkasunich> yeah
[01:55:07] <skunkworks> cool
[01:55:34] <skunkworks> I will play around with it. thanks :)
[01:55:44] <jmkasunich> you need to be carefull in layout, you don't want stray inductance adding to the resistor inductance
[01:55:51] <skunkworks> right
[01:56:05] <jmkasunich> the base and emitter of the transistor should be routed directly to the resistor terminals (think kelvin connections to the resistor)
[01:56:56] <jmkasunich> (base not really directly, because of the series resistor, but the 1K resistor goes direct to the top of the sense resistor, not to some other place on that trace)
[01:57:13] <skunkworks> ok
[01:57:17] <skunkworks> http://cgi.ebay.com/ws/eBayISAPI.dll?ViewItem&ih=004&item=140036713477&rd=1&sspagename=STRK%3AMEWN%3AIT&rd=1
[01:57:19] <jmkasunich> and the loop formed by sense resistor, 1K resistor, base, and emitter should be as small as possible
[01:57:21] <skunkworks> these are the diodes
[01:57:43] <jmkasunich> those should do quite nicely ;-)
[01:58:02] <jmkasunich> gotta heatsink them though
[01:58:11] <skunkworks> http://cgi.ebay.com/ws/eBayISAPI.dll?ViewItem&ih=004&item=140035968979&rd=1&sspagename=STRK%3AMEWN%3AIT&rd=1
[01:58:14] <skunkworks> mosfets
[01:58:24] <skunkworks> Planing on heatsinking them
[01:58:32] <jmkasunich> 44A mosfets? and you want to run at 40A?
[01:58:36] <jmkasunich> thats gonna be tough
[01:59:04] <skunkworks> pushing it?
[01:59:07] <jmkasunich> usually (not always) the rated amps of a mosfet is a marketing guy's dream rather than anything real
[01:59:19] <jmkasunich> sometimes its at a case temperature of 25C
[01:59:23] <jmkasunich> IOW an infinite heatsink
[01:59:29] <jmkasunich> gotta read the datasheet
[01:59:58] <jmkasunich> I assume when they write 0.12W rds on, they mean 0.12 ohms?
[02:00:01] <skunkworks> I don't know how far I want to take it. I will be starting out low. just to see how the thing will perform
[02:00:05] <skunkworks> right
[02:00:13] <jmkasunich> if so, 40A * 0.12ohms = 4.8V
[02:00:34] <jmkasunich> 4.8V * 40amps = 192 watts
[02:01:01] <skunkworks> right
[02:01:01] <jmkasunich> that's gonna need quite a heatsink
[02:01:20] <jmkasunich> what is your operating voltage?
[02:02:58] <skunkworks> to start with - 50v
[02:03:17] <skunkworks> if they work decent - could be as high as 150.
[02:03:21] <jmkasunich> heh, without a heatsink, 192W * 40 degC/W Rthja = 7680 degrees C rise
[02:03:40] <skunkworks> You should see what I have for heatsinks :)
[02:03:57] <jmkasunich> with a perfect heatsink, you have 0.2 degC/W from junction to case, and 0.24 case to sink, total 0.48
[02:04:09] <jmkasunich> oops, 0.44
[02:04:29] <jmkasunich> that means 84 degC rise above sink temp
[02:05:17] <jmkasunich> the max junction temp is 175, but a conservative design wouldn't go over about 160
[02:05:37] <jmkasunich> so the max allowable sink temp at 40A is 160-84 = 76C
[02:06:06] <jmkasunich> with a worst case ambient of say 35C, that means your sink can have only 41C rise above ambient
[02:06:28] <jmkasunich> 41C/192W = 0.213 deg C/watt
[02:06:49] <jmkasunich> I think you're gonna find there are very few heatsinks that can do that without a hurricane of air blowing on them
[02:07:05] <jmkasunich> you already bought the mosfets?
[02:07:16] <skunkworks> I will keep an eye on it.
[02:07:52] <skunkworks> yes - They might be only used for some smaller servos.
[02:08:04] <jmkasunich> if not, I'd strongly recomment using 200V parts
[02:08:17] <skunkworks> I figure this as a learning project.
[02:08:24] <jmkasunich> the same size/cost in 200V probably has 1/3 to 1/4 the on resistance, maybe even less than that
[02:08:34] <skunkworks> I see.
[02:09:22] <jmkasunich> I just looked at the thermalloy website
[02:09:40] <jmkasunich> their best sink for a TO-247 has 2.7 degrees C/w thermal resistance
[02:10:03] <jmkasunich> you need something more than 10 times better to use those fets at 40A
[02:10:29] <skunkworks> liquid cooled ;)
[02:10:38] <skunkworks> is that ambient?
[02:10:49] <jmkasunich> ?
[02:11:19] <skunkworks> sorry - brain fart
[02:11:39] <jmkasunich> http://www.aavidthermalloy.com/cgi-bin/stdisp.pl?Pnum=6400bg
[02:12:31] <jmkasunich> at 600 linear feet per minute airflow (thats a pretty strong wind), it gets down to about 1 degreeC/W, about 5 times higher than you need
[02:12:59] <jmkasunich> My gut feeling is that those fets, on good heatsinks with forced air, are good for 10-15 amps output current
[02:13:28] <skunkworks> wow. I didn't think it would be that bad.
[02:14:10] <jmkasunich> lets run thru the calcs for 10 amps - once you understand them, you can run them for any fet, any heatsink, and any current
[02:14:17] <skunkworks> thanks
[02:14:25] <jmkasunich> fet on resistance from data sheet: 0.12 ohms
[02:14:32] <jmkasunich> desired current: 10 amps
[02:15:10] <jmkasunich> voltage drop at desired current: 10A * 0.12ohms = 1.2V
[02:15:36] <skunkworks> 12w
[02:15:37] <jmkasunich> conduction loss at desired current: 1.2V * 10 amps = 12 watts
[02:16:00] <jmkasunich> junction to case thermal resistance from fet data sheet: 0.2 degC/W
[02:16:18] <jmkasunich> case to sink thermal resistance from fet data sheet: 0.24 degC/W
[02:16:26] <A-L-P-H-A> have aavidthermalloy is local to me.
[02:16:30] <A-L-P-H-A> have=hey
[02:16:39] <jmkasunich> total thermal resistance junction to sink: 0.2 + 0.24 = 0.44 degC/W
[02:17:17] <jmkasunich> junction temperature rise above sink temp: 12W * 0.44 degC/W = 5.28 degreesC
[02:17:55] <jmkasunich> from here you can go two ways - one is to calculate the require heatsink thermal resistance, then pick a sink
[02:18:04] <jmkasunich> the other is to pick a sink and see how hot it will get
[02:18:09] <jmkasunich> lets do it both ways
[02:18:15] <jmkasunich> first, the required thermal resistance
[02:18:30] <jmkasunich> maximum ambient temperature (you decide this) lets use 35C
[02:18:47] <jmkasunich> maximum junction temperature (from data sheet) 175C
[02:18:52] <jmkasunich> safety margin: 15C
[02:19:07] <jmkasunich> desired max junction temp: 175 - 15 = 160C
[02:19:20] <A-L-P-H-A> buahha... clippy for linux
http://vigor.sourceforge.net/screenshots/
[02:19:21] <jmkasunich> temp rise from sink to junction (calc'ed above): 5.28C
[02:19:36] <jmkasunich> max sink temp: 160C - 5.28C = ~155C
[02:20:02] <jmkasunich> temp rise allowed in heatsink: max sink temp (155C) - max ambient (35C) = 120C
[02:20:33] <jmkasunich> required heatsink thermal resistance: 120C / 5.28W = 22.7 degreesC/Watt
[02:21:14] <jmkasunich> that is easy, thermally has quite a few sinks for TO-237 that can beat that even with natural convection
[02:21:45] <skunkworks> that makes sense
[02:21:58] <jmkasunich> lets calculate the actual junction temp
[02:22:12] <jmkasunich> http://www.aavidthermalloy.com/cgi-bin/stdisp.pl?Pnum=513001b02500g
[02:22:35] <jmkasunich> theres a nice heatsink with 13.4 degC/W thermal resistance
[02:23:08] <jmkasunich> so, heatsink rise = power * Rth = 5.28W * 13.4 degC/W = 70.7 degC
[02:23:21] <jmkasunich> woops
[02:23:25] <jmkasunich> I screwed op
[02:23:28] <jmkasunich> up even
[02:23:48] <jmkasunich> when I calced the thermal resistance requried for the heatsink, I used 5.28W
[02:23:57] <jmkasunich> thats not the power, thats the junction/case rise
[02:24:01] <jmkasunich> the power is 12W
[02:24:10] <jmkasunich> so
[02:24:26] <jmkasunich> required thermal resistance is 120C / 12W = 10 degreesC/watt
[02:24:38] <jmkasunich> and the 13.4 degC/watt heatsink won't cut it
[02:24:56] <jmkasunich> are you still following me, or did my mistake screw you up?
[02:25:16] <skunkworks> I was looking back - trying to figure out what affect that had
[02:25:28] <jmkasunich> this really wants a spreadsheet
[02:25:54] <skunkworks> It screams spreadsheed
[02:25:57] <skunkworks> sheet even
[02:26:00] <jmkasunich> put each step of the calculation on a line, plug in the datasheet numbers and the current, and see the results as well as the step by step results
[02:26:39] <jmkasunich> anyway, lets pick a differnet heatsink, on that is better than 10C/W
[02:26:40] <jmkasunich> http://www.aavidthermalloy.com/cgi-bin/stdisp.pl?Pnum=593101b03600g
[02:26:52] <jmkasunich> it is 8.6 degreesC/watt
[02:27:16] <jmkasunich> so, the rise in the sink will be 12W * 8.6degC/W = 103.2C
[02:27:28] <jmkasunich> the internal rise in the fet is 5.28C (from way up above)
[02:27:56] <jmkasunich> so the total rise is 103.2+5.28 = 108.48C
[02:28:22] <jmkasunich> if the ambient is 35C, add that to 108.5 and you get 143.5
[02:28:34] <jmkasunich> pretty toasty, but acceptable given the part rating of 175
[02:28:57] <skunkworks> cool. this makes sense.
[02:29:04] <A-L-P-H-A> wouldn't that shorten the life of the part?
[02:29:06] <skunkworks> * skunkworks is printing this out.
[02:29:13] <jmkasunich> cooler is better of course
[02:29:14] <A-L-P-H-A> even though the part life is 50K hrs
[02:29:32] <A-L-P-H-A> or 100k
[02:29:36] <A-L-P-H-A> <shrug>
[02:29:39] <jmkasunich> dropping the current has a squared effect
[02:29:47] <jmkasunich> fet on resistance has a linear effect
[02:31:16] <skunkworks> I was planning on using some large heatsinks I had from some old speed control equipment. I suppose I could find something similar to get the thermal resistance.
[02:31:25] <A-L-P-H-A> debating the cost difference, is a torroidial transformer worth the extra cost? normal transformer $40, versus torroidial ~$70. I'm selling my old power supply for no money lost.
[02:31:36] <jmkasunich> large as in multiple fets on one sink?
[02:31:51] <skunkworks> well crap - yes
[02:32:04] <jmkasunich> keep in mind that the fet mounting surface is probably electrically live
[02:32:15] <jmkasunich> it most likely connected to the drain
[02:32:24] <jmkasunich> so you can put all the high side fets on one sink
[02:32:29] <skunkworks> now we are talking mica thermal issues arn't we
[02:32:48] <jmkasunich> but the low side fets need either individual sinks, or electrical insulation (mica or more modern stuff)
[02:33:49] <kjensen> anyone here ever try to use a torchmate signal generator with EMC?
[02:36:21] <cradek> haven't heard of that, what is it?
[02:37:05] <A-L-P-H-A> I would imagine something to do with plasma cutters, but what would a signal generator have to do with plasma cuting?
[02:37:17] <A-L-P-H-A> kjensen: could you tell us more?
[02:38:00] <kjensen> well, the signal generator connects to the parallel port
[02:38:08] <kjensen> then this actuates the stepper motors.
[02:38:16] <kjensen> it has the power electronics and some logic built into it
[02:38:21] <jmkasunich> oh
[02:38:41] <jmkasunich> Ihave a hunch that the "signal generator" part is generating steps
[02:38:46] <jmkasunich> which emc already does itself
[02:38:57] <kjensen> I was wondering if anyone has any idea if they used a simple data packet for the step generation or something more propritary
[02:39:04] <jmkasunich> no clue
[02:39:11] <jmkasunich> do you have a manual or any docs?
[02:39:16] <kjensen> they provide nothing
[02:39:38] <kjensen> the manual says plug the signal generator cable into the parallel port of your computer
[02:40:02] <cradek> do you have software that runs it, and a scope?
[02:40:30] <kjensen> short of capturing the output with a logic analyzer I was hoping to find someone who's already taken the initiative )
[02:40:47] <jmkasunich> first you'd have to find someone who has that hardware
[02:41:41] <kjensen> I can get a hold of it to look at the output, guess that's what I will end up doing
[02:41:42] <kjensen> thanks
[02:42:11] <cradek> maybe there's some stage inside where it's step/dir or phase drive, and you can just remove parts until it's suitable for use with emc
[02:42:34] <cradek> maybe look for obvious driver chips and find their datasheet
[02:42:46] <kjensen> it's an fpga
[02:42:49] <jmkasunich> yeah - it depends on how much of an electronics hacker you are
[02:42:57] <jmkasunich> well, so much for that idea
[02:43:02] <kjensen> yah
[02:43:18] <kjensen> i can't download the configuration prom either
[02:43:25] <jmkasunich> have you googled for documentation?
[02:43:28] <kjensen> ya
[02:43:30] <kjensen> nada
[02:43:47] <kjensen> there is a manual but is says nothing of the interface specifics
[02:51:12] <kjensen> hah, found a rather complete manual on mit.edu ... if anyone asks in the future here it is ...
http://fab.cba.mit.edu/tools_new/machines/torchmate_plasma_and_routing/torchmate_hardwareguide.pdf#search=%22torchmate%20manual%22
[02:51:43] <kjensen> but it's not up to date the their new hardware though... maybe the port i/o is ok
[02:52:37] <jmkasunich> that manual says it speaks _serial_ to the host PC, not parallel
[02:53:12] <jmkasunich> waitaminnit
[02:53:18] <jmkasunich> this box is serial in, and step/dir out
[02:53:38] <jmkasunich> the next box in the chain takes the step/dir signals from this box and drives the motors
[02:54:06] <jmkasunich> so you can just skip using this box completely, and send emc's step/dir signals direct to the driver box
[02:55:19] <jmkasunich> interesting, the board layout image shows "flashcut" as a brand name
[02:55:31] <jmkasunich> that I _have_ heard of before
[02:55:47] <kjensen> it's different than what i have but i think the output is similiar
[02:56:45] <CIA-8> 03jmkasunich 07HEAD * 10infrastructure/farm-scripts/README: fixup README after removal of rcslib and emc1
[03:00:55] <Jymmm> Hola
[05:36:59] <A-L-P-H-A> ohla
[06:27:22] <Jymmm> Hasta!
[08:46:19] <K`zan> Night all!
[09:59:57] <danex> Good Afternoon alex_joni
[11:43:25] <ValueQ> ValueQ is now known as ValveQ
[11:53:53] <Bo^Dick> the stepper motor development has begun
[11:54:08] <Jymmm> DIY Stepper Motors?
[11:54:47] <CIA-8> 03jepler 07HEAD * 10emc2/src/rtapi/sim_rtapi_app.cc:
[11:54:47] <CIA-8> support 'newinst'
[11:54:47] <CIA-8> remove debugging statements
[11:55:03] <Bo^Dick> stepper motor systems that is, not building the actual motor
[11:55:44] <Bo^Dick> it'
[11:55:51] <Bo^Dick> s gonna do 1/32 stepping
[11:55:53] <Jymmm> Nu hu.... you said stepper motor dev. We'll expect the first prototype in 72 hours.
[11:56:24] <Jymmm> so.... start winding!!! LOL
[11:56:54] <alex_joni> * alex_joni bites his lower lip
[11:57:17] <Bo^Dick> i'm gonna love this stepper driver
[11:57:36] <CIA-8> 03jepler 07HEAD * 10emc2/src/hal/utils/halcmd.c: support newinst for simulator
[11:58:00] <Jymmm> alex_joni: DONT DO THAT!
[11:58:26] <alex_joni> Jymmm: why not? it helps me not say anything :D
[11:58:39] <Jymmm> too painful
[12:02:51] <Bo^Dick> the only thing i haven't mastered yet is the resonance stuff
[12:03:11] <Bo^Dick> wonder if that could be performed by tweaking with phase 1 and 2 in relation to each other
[12:03:20] <Bo^Dick> this would be piece of cake for a µc
[12:03:58] <Bo^Dick> if that is taken into consideration this stepper driver could be a real beast
[12:04:40] <Bo^Dick> and besides that, since i've done the carnaugh and gate-flipflop designing i now love working with µcs
[12:04:41] <Jymmm> you should call Marriss and ask what he does.
[12:05:25] <Bo^Dick> well if marriss can do it without µcs i can't see how a µc wouldn't be good enough for the task
[12:06:02] <Bo^Dick> one more thing, why does the geckodrives use 10 radix when microstepping?
[12:06:13] <Jymmm> I wish I could remember what he said (but the man can talk your ear pff =)
[12:06:27] <Jymmm> radix?
[12:06:44] <Bo^Dick> it uses /10 stepping instead of parts of 2^n
[12:07:18] <Bo^Dick> my will perform 1, 1/2, 1/4, 1/8, 1/16, 1/32
[12:07:30] <Bo^Dick> can't see why 1/10 would be the best
[12:08:09] <CIA-8> 03jepler 07HEAD * 10emc2/src/Makefile: don't suggest make setuid for sim
[12:09:18] <CIA-8> 03jepler 07HEAD * 10emc2/src/hal/utils/halcmd.c: use halpr_find instead of a loop
[12:10:32] <ValveQ> ValveQ is now known as ValarQ
[12:13:01] <CIA-8> 03jepler 07HEAD * 10emc2/src/hal/utils/halcmd.c: show ready/initializing for realtime components
[12:33:37] <Jymmm> SWPadnos: Mom?
[12:33:44] <SWPadnos> no, I'm not your mother
[12:33:52] <anonimasu> hello
[12:33:53] <Jymmm> SWPadnos: Daughter?
[12:33:55] <ValarQ> hi there
[12:33:56] <SWPadnos> hit
[12:34:01] <SWPadnos> hi
[12:34:08] <SWPadnos> hmm - I don't thin I'm anyone's daughter
[12:34:11] <SWPadnos> think, either
[12:34:20] <Jymmm> SWPadnos: G'Mornin =)
[12:34:28] <SWPadnos> oh, hi Jymmm :)
[12:34:40] <alex_joni> hi SWPadnos
[12:34:46] <Jymmm> SWPadnos: If you weren't awake, you should be now!
[12:34:47] <SWPadnos> hi Alex
[12:34:54] <SWPadnos> Ga-ya was great
[12:35:01] <alex_joni> yeah?
[12:35:07] <alex_joni> was it the one in my pictures?
[12:35:14] <SWPadnos> yep. like you, I was the only person there ;)
[12:35:15] <anonimasu> what's up?
[12:35:18] <SWPadnos> I'm not sure
[12:35:19] <alex_joni> SWPadnos: yay
[12:35:34] <SWPadnos> it was nice having the waitress to myself :)
[12:35:46] <alex_joni> SWPadnos: heard you met someone at the photokina :D
[12:35:53] <SWPadnos> heh - so I did
[12:36:04] <alex_joni> news travel fast don't they :P
[12:36:08] <SWPadnos> is he cncuser (or whoever it was that did the coolcnc disc)?
[12:36:15] <SWPadnos> yeah - and people travel slowly
[12:36:16] <alex_joni> no, but related
[12:36:22] <SWPadnos> I knew that ;)
[12:36:28] <alex_joni> he's the boss of cool tool
[12:36:39] <SWPadnos> they're neat machines
[12:36:42] <alex_joni> cncuser is a friend of one of his employees
[12:36:48] <SWPadnos> ah
[12:37:03] <alex_joni> but cncuser isn't really digging all that anymore :)
[12:37:19] <alex_joni> I might pay them a visit next friday
[12:37:25] <SWPadnos> cool
[12:37:33] <SWPadnos> are they based near Cologne?
[12:37:33] <alex_joni> if I get a chance.. we'll see
[12:37:39] <alex_joni> no, they are in vienna :D
[12:37:44] <SWPadnos> ok, that's a ways
[12:37:46] <alex_joni> close enough thtough
[12:37:47] <alex_joni> :D
[12:38:00] <SWPadnos> I was pretty surprised to see their booth at a photo trade show
[12:38:06] <alex_joni> I'm on wednesday in Frankfurt
[12:38:10] <alex_joni> and on friday in vienna
[12:38:18] <SWPadnos> ah - missed you by a couple of days then :(
[12:38:24] <alex_joni> yeah
[12:39:03] <skunkworks> alex_joni: remember me showing you the mosfets I had gotten. - You said you used similar ones.. How many amps do they take?
[12:39:52] <alex_joni> I used IRFZ44N.. those ones?
[12:40:04] <alex_joni> they were rated 44A, I used them at about 10A max
[12:40:13] <alex_joni> probably 2-4A usually
[12:40:21] <skunkworks> FDH44N50 N-Channel MOSFET transistors 500V / 44 A
[12:40:21] <alex_joni> and they were really cool
[12:40:51] <alex_joni> http://www.google.com/url?sa=t&ct=res&cd=1&url=http%3A%2F%2Fwww.irf.com%2Fproduct-info%2Fdatasheets%2Fdata%2Firfz44n.pdf&ei=bloiRcbjBqCs2gK7lJ2kDA&sig=__9qcooGk9y0oAnyqKCM8dtzp-JAg=&sig2=dqRLDlY5H9-CHpJFJN7bAA#search=%22IRFZ44N%22
[12:42:40] <alex_joni> SWPadnos: right, pretty odd to visit that trade show
[12:42:47] <alex_joni> SWPadnos: what did they have there?
[12:42:56] <SWPadnos> the unimat and stuff
[12:43:14] <SWPadnos> I don't think they had a CNC powered up, but htey had one there
[12:45:33] <skunkworks> SWPadnos: Hi -- still in germany?
[12:45:41] <SWPadnos> nope - I got home last night
[12:46:03] <SWPadnos> I think that's why I'm up so early (it's teatime there ;) )
[12:46:13] <skunkworks> :)
[12:48:40] <anonimasu> hm..
[12:48:47] <anonimasu> I'm going to finish my huydralic tank
[12:48:51] <skunkworks> jmk did some quick heat sink calcs for the ones I bought - He think I will only be able to get 10-15 amps out of them :O - but they still give me something to play with.
[12:49:01] <anonimasu> getting the valves tomorrow
[12:50:52] <alex_joni> skunkworks: you can always drive more of them in parallel
[12:50:58] <alex_joni> although that's an issue at 25kHz
[12:51:46] <skunkworks> they have a rds of .12 ohms. which 40 amps is 192 watts.
[12:52:03] <skunkworks> really? why is that?
[12:52:14] <SWPadnos> differences in switching time
[12:52:22] <SWPadnos> = death of one FET
[12:52:26] <skunkworks> ah
[12:52:27] <SWPadnos> = death of all FETs
[12:52:31] <alex_joni> indeed
[12:52:35] <alex_joni> you need to match them :D
[12:52:59] <SWPadnos> if they have the same manufacturing lot code, it may work OK
[12:53:10] <skunkworks> jeeze this sounds like building an op amp and needing to match the hfe :)
[12:53:31] <SWPadnos> huh - funny ;)
[12:53:59] <alex_joni> skunkworks: I remember seeing some guy do it (somewhere on the web)
[12:54:05] <alex_joni> he used 16 transistors
[12:54:28] <alex_joni> and some nice PCB's.. can't really remember the link.. this was about 3 or 4 years ago
[12:54:37] <SWPadnos> .12 Rds is pretty terrible, isn't it?
[12:54:41] <skunkworks> I think I am just going to try it and see - keeping track of temps.
[12:54:48] <SWPadnos> shouldn't that be closer to 0.012?
[12:54:55] <skunkworks> seemed low at the time :) they are 500v
[12:55:04] <SWPadnos> ok
[12:55:52] <skunkworks> Like i say - I have more heatsinks than brains
[12:56:13] <alex_joni> http://www.tlb.org/scooterpark.mpg
[12:56:48] <skunkworks> I just don't under stand how they can rate them like that if you can't get the heat out of them.
[12:57:05] <SWPadnos> you may be able to with active cooling
[12:57:19] <skunkworks> That is the plan. fans fans and more fans
[12:57:29] <skunkworks> or or wait - water cooled :)
[12:58:26] <SWPadnos> heat pipes to large radiators
[12:58:42] <skunkworks> the plan is to hook one up to a heat sink - run 10 amps thru it and measure the temp - then 20 then 30 then 40 and see what happens :)
[12:59:18] <SWPadnos> well, the thermal resistance is fairly low - 0.24 C/W
[12:59:51] <SWPadnos> so at 192W, you get a 46.2 degree (C) temp rise at the heatsink
[13:00:04] <SWPadnos> oops - 46.08
[13:01:20] <skunkworks> hmm - but jmk adds the juction to case and the case to heatsink so it is .44
[13:01:41] <SWPadnos> ah - OK. I'm not a thermal dude, so he's more likely right :)
[13:01:53] <skunkworks> He has been so far :)
[13:01:57] <SWPadnos> even so, you get a ~85 degree rise
[13:02:13] <SWPadnos> (at 192W)
[13:02:25] <SWPadnos> the absolute max is 750W (!)
[13:02:59] <skunkworks> wow. I would have to go back and see how he was doing it..
[13:03:19] <skunkworks> but it was more doom and gloom :)
[13:03:36] <alex_joni> SWPadnos: any idea what an line-interactive UPS does?
[13:03:39] <skunkworks> planning on printing it out today (he did it last night)
[13:04:06] <SWPadnos> alex_joni, I don't remember which is which, but one type always runs the equipment from the battery so there's no switchover time
[13:04:27] <SWPadnos> the other type turns on the inverter when necessary (standby, I think)
[13:04:36] <anonimasu> are thre really switchover time on other ups:es?
[13:05:00] <SWPadnos> yes, but it's usually less than one half-cycle, so there's no apparent loss of power at the UPS outlets
[13:05:11] <SWPadnos> or they rely on the "hold-up time" of the PC power supply
[13:06:31] <alex_joni> SWPadnos: line interactive seems to be the one that runs off the inverter all the time
[13:06:48] <alex_joni> http://en.wikipedia.org/wiki/Uninterruptible_power_supply#Line-interactive
[13:06:51] <SWPadnos> I beleive that's true, but wasn't sure
[13:09:05] <alex_joni> hmm.. there is one available around here: TECNOWARE Easy Protector 200 1000VA, AVR, RS232, USB, RJ11
[13:09:08] <alex_joni> for about 50 EUR ;)
[13:09:36] <alex_joni> or an APC Smart-UPS, 1000VA / 670W, line-interactive for about 400 EUR
[13:09:42] <SWPadnos> uh, yeah. I'd trust my computer to that company
[13:09:46] <alex_joni> make that 450 EUR
[13:09:47] <SWPadnos> who was that again? ;)
[13:09:50] <SWPadnos> much better
[13:10:27] <alex_joni> http://www.tecnoware.com/uk/
[13:11:38] <alex_joni> some italian company
[13:13:27] <alex_joni> so you'd get the APC one?
[13:16:41] <skunkworks> I have used apc totally. only had one burn up so far :)
[13:17:55] <skunkworks> we are talking out of 20 or so.
[13:18:20] <skunkworks> we did have a 'best power' one before. I wonder if they are still in business
[13:18:31] <alex_joni> I could get this one:
http://www.apcc.com/resource/include/techspec_index.cfm?base_sku=SUA1000RMI2U
[13:19:04] <alex_joni> wonder if triplite is any better than apc
[13:20:44] <alex_joni> bbl...
[14:18:28] <ValarQ_> ValarQ_ is now known as ValarQ
[16:06:22] <cradek> 'Since the 1.0.x series of Firefox is not supported any more, this update introduces the firefox 1.5 series into Ubuntu 5.10.'
[16:06:58] <jepler> huh, what a surprise
[16:07:08] <cradek> yeah
[16:08:02] <jepler> I am thinking about reinstalling my laptop with 6.06 and no realtime (it's currently on 5.10 with realtime)
[16:08:14] <cradek> I've had the same thoughts
[16:08:38] <cradek> well I'd probably install realtime since I sometimes run machinery with it
[16:09:03] <skunkworks> cradek: how well does it run realtime?
[16:09:15] <cradek> my laptop works perfectly, I'm VERY lucky
[16:10:18] <skunkworks> nice
[16:10:37] <jepler> hm I just realized that I could start work on 64-bit support for emc2 with --enable-simulator
[16:10:42] <cradek> still, I don't use it for that much
[16:10:52] <cradek> jepler: that would be cool
[16:10:59] <cradek> do you think it's a big project?
[16:11:03] <jepler> yeah probably
[16:11:18] <jepler> it looks like libnml assumes the widths of types like 'int' and 'long'
[16:11:32] <cradek> that's too bad
[16:11:34] <jepler> I would be surprised if those kinds of assumptions weren't all over
[16:11:53] <cradek> that's a bit surprising, it used to be a multi-platform piece of software
[16:12:28] <cradek> they must have all matched in the important ways
[16:22:00] <skunkworks> simulator up and running?
[16:22:43] <cradek> sure works for me
[16:23:19] <skunkworks> cool - when is it going to be ported to xp? :) (kidding)
[16:23:46] <cradek> it could maybe actually run under mingw
[16:24:11] <cradek> if anyone would care to bother
[16:25:16] <skunkworks> mingw is a linux simulator?
[16:25:34] <cradek> I probably mean cygwin
[16:25:39] <cradek> * cradek doesn't know squat about windows
[16:25:52] <jepler> both provide some extent of a unix-like runtime on windows
[16:26:29] <cradek> so for only the price of a windows license, you can have something that works like a not-very-good unix machine
[16:26:59] <cradek> sorry, troll
[16:27:00] <bill20r3> sounds like a deal I can afford to miss
[16:28:06] <skunkworks> you guys :)
[16:28:50] <CIA-8> 03jepler 07HEAD * 10emc2/src/ (configure configure.in): look for tclConfig and tkConfig in the right place for 64-bit machines
[16:33:46] <alex_joni> cradek: rcslib was, but I bet that got ripped out for libnml
[16:34:22] <alex_joni> cradek: the widths of the types I mean
[16:37:48] <CIA-8> 03jepler 07HEAD * 10emc2/src/Makefile: use -fPIC on these items, which are part of shared libraries
[16:37:48] <CIA-8> 03jepler 07HEAD * 10emc2/src/hal/Submakefile: use -fPIC on these items, which are part of shared libraries
[16:37:48] <CIA-8> 03jepler 07HEAD * 10emc2/src/emc/usr_intf/xemc.cc: fix error about cast that loses precision
[16:42:19] <CIA-8> 03jepler 07HEAD * 10emc2/src/rtapi/sim_common.h: fix error about cast that loses precision
[16:49:22] <CIA-8> 03jepler 07HEAD * 10emc2/src/.swish_config: don't try to index dvi files
[16:52:57] <SWPadnos> rcslib was meant to run on microcontrllers, in some form
[16:56:14] <CIA-8> 03jepler 07HEAD * 10emc2/src/hal/components/ (7 files): use rtapi_ctype.h or remove inclusion of linux/ctype.h, as appropriate
[16:56:14] <CIA-8> 03jepler 07HEAD * 10emc2/src/hal/drivers/ (5 files): use rtapi_ctype.h or remove inclusion of linux/ctype.h, as appropriate
[17:04:49] <CIA-8> 03alex_joni 07HEAD * 10emc2/src/hal/components/ (freqgen.c stepgen.c): use the fix jepler suggested
[17:29:43] <CIA-8> 03alex_joni 07HEAD * 10emc2/src/libnml/read.me: updated notes
[17:53:25] <anonimasu> hm
[17:53:27] <anonimasu> I have a spindle
[17:55:16] <alex_joni> does it spin?
[17:55:21] <alex_joni> :-)
[17:56:12] <bill20r3> does it also dle?
[17:56:19] <alex_joni> dle is hard
[17:56:35] <anonimasu> dle?
[17:56:38] <anonimasu> not yet..
[17:56:43] <anonimasu> making a motor mount tomorrow
[17:56:44] <alex_joni> spin dle :D
[17:57:02] <anonimasu> but I got the preload and stuff in it right :)
[18:00:56] <anonimasu> hm, how much runout is too much?
[18:01:06] <SWPadnos> 0.0000000002
[18:01:16] <anonimasu> lol
[18:01:21] <anonimasu> seriously
[18:01:37] <SWPadnos> it depends on what size tools you expect to use
[18:02:03] <SWPadnos> if you plan on using 0.016 (inch) end mills, then 0.001-0.002 may be too much
[18:02:12] <SWPadnos> plus it causes scalloping on the work surface
[18:02:12] <anonimasu> well, I've got less then 0.005mm..
[18:02:22] <SWPadnos> that's probably pretty good ;)
[18:02:27] <anonimasu> just curious..
[18:03:05] <anonimasu> I think it's less.. but my indicator just does 0.01
[18:03:25] <anonimasu> should be small enough to do nice work
[18:03:38] <SWPadnos> I'd think so
[18:04:21] <anonimasu> im googling around
[18:04:24] <anonimasu> http://www.mmsonline.com/articles/070603.html
[18:04:48] <anonimasu> 0.0006 inch is close to the figure that shops considered good runout in the informal survey.
[18:04:59] <anonimasu> heh.. that sounds like much :P
[18:05:20] <anonimasu> well, going to mount the motor tomorrow
[18:05:37] <anonimasu> need to order a shorter toothed belt :)
[18:05:54] <anonimasu> and in 2 days I get the valves for on/off/reverse
[18:07:46] <anonimasu> then hook up the plc and the vfd(and write code) and hook up the huydralic motor :)
[18:18:20] <alex_joni> are those proportional valves?
[18:18:32] <alex_joni> or do you regulate the speed by pressure?
[18:18:49] <skunkworks> .007 was too much for drilling circuit boards :)
[18:19:06] <alex_joni> .007 golden eye?
[18:19:50] <skunkworks> .007" runout on my router.
[18:20:15] <anonimasu> no
[18:20:27] <anonimasu> alex_joni: I've got a vfd so I vary speed by flow
[18:20:34] <anonimasu> the pressure will be constant..
[18:20:35] <anonimasu> :)
[18:20:45] <alex_joni> flow, so you have proportional valves?
[18:20:50] <anonimasu> nope
[18:20:53] <anonimasu> I have a vfd
[18:20:55] <alex_joni> or is it a pump with variable flow?
[18:21:01] <skunkworks> have these mosfets and diode in hand. Time for some destructive testing. :)
[18:21:08] <alex_joni> vfd = variable frequency drive
[18:21:10] <anonimasu> yeah
[18:21:15] <anonimasu> I crank the motor rpm down
[18:21:34] <anonimasu> err motor/pump
[18:21:34] <anonimasu> that is
[18:21:38] <anonimasu> not the huydralic motor
[18:21:39] <alex_joni> anonimasu: if that's the pump motor then the pressure will go down :)
[18:21:39] <skunkworks> what do you need the hydrolics for?
[18:21:54] <alex_joni> skunkworks: smaller spindle
[18:22:09] <anonimasu> 4kw.. ;)
[18:22:48] <skunkworks> interesting. Our big kerney and trecker mill used to have a hydrolic spindle. - 2 pumps - one for one speed range - both for the other range.
[18:22:54] <anonimasu> alex_joni: I've got a pretty much larger pump then I need so the pressure should stay the same..
[18:23:04] <anonimasu> even if I lower the rpm..
[18:23:05] <alex_joni> anonimasu: ;-)
[18:23:05] <skunkworks> Now it has a 5 hp vfd on it :)
[18:23:14] <anonimasu> the best thing would be if I had a variable pump
[18:23:20] <anonimasu> but the ones I have are > 100kw
[18:23:30] <alex_joni> now that's a spindle
[18:23:35] <alex_joni> > 100 kW :D
[18:23:37] <anonimasu> and 250l/min
[18:23:56] <anonimasu> the calculation is with 1:1 6000rpm..
[18:24:06] <anonimasu> that's overdriving the huydralic motor just a little bit
[18:26:11] <anonimasu> ^_^
[18:28:36] <anonimasu> *yawn*
[18:29:59] <CIA-8> 03alex_joni 07HEAD * 10emc2/src/emc/motion/usrmotintf.h: removed unexisting external function definitions
[18:32:24] <CIA-8> 03alex_joni 07HEAD * 10emc2/src/emc/motion/ (command.c motion.h usrmotintf.cc):
[18:32:24] <CIA-8> First half or re-enabling leadscrew error compensation.
[18:32:24] <CIA-8> The compensation data now reaches the RT part, next step to actually use it.
[18:32:24] <CIA-8> note: alter hasn't been touched. needs discussion...
[18:32:47] <cradek> alter?
[18:32:56] <alex_joni> indeed.. wtf is alter anyways :D
[18:33:11] <jepler> libnml/buffer/physmem.cc 146: PHYSMEM_HANDLE: Can't write 4320 bytes at offset 72 from buffer of size 4064.
[18:33:26] <jepler> emc2 now compiles on fc4/x86_64 but gets these errors when run
[18:33:34] <jepler> I wonder what it means
[18:34:10] <alex_joni> probably that 4320 can't be squeezed into 4064 ?
[18:34:17] <cradek> yeah
[18:34:21] <cradek> something (tool table?) got too big
[18:34:32] <cradek> I ran into the same crap when I enlarged the tool table
[18:34:43] <alex_joni> or the 4320 are so big because some data types are larger for x64
[18:34:52] <cradek> try reducing the magic define that limits the number of tools
[18:34:54] <alex_joni> cradek: alter = additive dynamic compensation
[18:35:02] <alex_joni> defined in buzzwords
[18:36:32] <alex_joni> cradek: _if_ I'm getting it right, it allows to add an offset to an joint (something like we have in emc2 named motor_offset)
[18:39:12] <A-L-P-H-A> hello folks.
[18:39:19] <alex_joni> anonimasu: 21:39
[18:39:23] <alex_joni> A-L-P-H-A: 21:39
[18:39:29] <A-L-P-H-A> alex_joni. :) your reply got it already.
[18:39:30] <anonimasu> 20:38
[18:39:37] <A-L-P-H-A> and you're outta time sync, I I am.
[18:39:47] <A-L-P-H-A> looks like I was
[18:39:58] <A-L-P-H-A> clock drift is bad with this slightly overclocked machine.
[18:40:02] <A-L-P-H-A> [accidental overclock]
[18:59:35] <CIA-8> 03alex_joni 07HEAD * 10emc2/scripts/emc.in: consistent naming
[19:22:34] <skunkworks> Bo^Dick:
http://www.cnczone.com/forums/showthread.php?t=24699&highlight=chip+stepper+drive
[19:23:39] <jepler> bah, only up to 50V? We want to drive our steppers with rectified 220V mains!
[19:23:53] <Bo^Dick> i hope allegro has improved their one-chip solutions
[19:25:06] <skunkworks> jepler: thats what I want also :)
[19:25:57] <skunkworks> Is that wrong?
[19:26:13] <Bo^Dick> allegros old "mixed decay" system used fast-decay on the entire down-slope on the curve
[19:26:39] <cradek> wow the jpg of the board layout in that thread is terrible
[19:27:05] <skunkworks> cradek: yes :)
[19:27:11] <Bo^Dick> fast-decay is only necessary the short instant whenever the reference current is less than the actual
[19:27:13] <jepler> skunkworks: I don't know what's typical, but I have noticed cradek's steppers give the insulation as only 65V .. if that's typical, you'll only come to ears trying to do something like that
[19:27:46] <skunkworks> jepler: I was kidding. never needed more than 60v for our steppers.
[19:27:55] <cradek> I bet 50v is often plenty for nema23/nema34
[19:28:27] <A-L-P-H-A> I don't see the layout
[19:29:08] <A-L-P-H-4> I see the layout now...
[19:29:10] <A-L-P-H-4> WOW... that is CRAP.
[19:29:20] <A-L-P-H-4> A-L-P-H-4 is now known as A-L-P-H-A
[19:29:30] <skunkworks> cradek:
http://www.cnczone.com/forums/showthread.php?t=25134
[19:29:32] <A-L-P-H-A> I could do a better job. hahah.
[19:29:45] <skunkworks> Sorry about coming off as a total idiot
[19:30:01] <A-L-P-H-A> skunkworks, nah.
[19:30:13] <A-L-P-H-A> Jymmm and I have a race on that category.
[19:30:44] <A-L-P-H-A> thank God (the Christian one) for adblock plus, and filter lists. :D
[19:31:43] <cradek> skunkworks: heh you're very generous
[19:31:53] <skunkworks> yes chis I am :)
[19:32:07] <A-L-P-H-A> is he giving away money?
[19:32:10] <A-L-P-H-A> I was inline first.
[19:32:26] <cradek> skunkworks: all these threads seem to say the maxnc controllers are not very good - also my experience. I bet the closed-loop (more complex) controller is worse than mine was.
[19:33:00] <A-L-P-H-A> I stand by my unpaid endorsement for gecko drive. www.geckodrive.com
[19:33:16] <A-L-P-H-A> if enough people go to him, cause of me... maybe I'll get a free gecko on my next order. :D
[19:33:44] <skunkworks> I played with current limited stepper drives using resisters. they sucked,
[19:33:50] <Bo^Dick> my version of the "mixed decay" current scheme is smarter than the official allegro "mixed decay" scheme
[19:34:07] <skunkworks> Bo^Dick: how does it run?
[19:34:13] <A-L-P-H-A> could edumacate me on what 'mixed decay' is?
[19:34:28] <Bo^Dick> allegro just has a plain timer that times out the fast decay into slow decay
[19:34:50] <Bo^Dick> my idea is to measure when fast decay has done it's job
[19:34:52] <A-L-P-H-A> how about 'decay'?
[19:35:56] <Bo^Dick> since the senseresistor is disconnected during the fast-decay process this requires a smart trick
[19:36:10] <Bo^Dick> a smart trick that i know the answer to
[19:37:20] <Bo^Dick> it's amazing allegro hasn't thinked this through
[19:37:32] <skunkworks> cradek: where they steppers with feedback or servos?
[19:38:02] <cradek> I think their CL system still uses steppers, I'm not sure of the details, I've never actually seen one
[19:47:51] <cradek> I just read the maxnc yahoogroup for a while and heard about how everyone had problems and kept buying new driver boards from maxnc at great expense
[19:48:10] <alex_joni> eeek.. talk about customer support
[19:48:30] <cradek> oh I'm sure they were friendly while they sold people the new driver boards :-)
[19:48:39] <cradek> they've always been friendly when I've called
[19:50:49] <cradek> I saw plenty of reports of them blaming the customer for the board failing (e.g. the customer turned on the drive board without the software running), which I think may be how they sold the replacements
[19:51:51] <jepler> stepper + index pulse: you can notice when you stalled, and make an educated guess about how many steps the stall lost. Just stop and ramp up to speed again after a missed inex pulse.
[19:52:30] <jepler> </badidea>
[19:52:38] <cradek> yeah no kidding
[19:53:01] <cradek> who is suggesting that?
[19:53:05] <jepler> I just made that system up
[19:53:34] <jepler> the worst system that could possibly be called "closed loop"
[19:54:08] <alex_joni> * alex_joni bets a cup of coffee you can do that in hal
[19:54:24] <jepler> how about a keg of really cheap beer instead?
[19:54:49] <alex_joni> nah, I suggested coffee cause I don't drink any
[19:55:24] <jepler> what do you drink to stay up all night?
[19:55:31] <alex_joni> coke :)
[19:55:40] <alex_joni> as in coca cola :P
[19:55:44] <alex_joni> not the white stuff
[19:56:08] <cradek> it would be interesting to hook stepper-encoder following error to adaptive feed and see if it slows down instead of stopping if you overload it
[19:56:18] <cradek> I wonder how much encoder resolution you would need - seems like a lot
[19:56:37] <alex_joni> question is.. how do you figure if you overload?
[19:56:39] <cradek> many encoder counts per step
[19:56:53] <alex_joni> encoder counts / sec?
[19:57:10] <skunkworks> then you have the fudge of microstepping.
[19:57:17] <alex_joni> then you could aswell turn the max_vel down
[19:57:27] <cradek> I'm talking about sensing that the previous step hasn't successfully gotten the motor fully into position
[19:57:50] <cradek> isn't that the first sign of an impending stall? if so you can sense it with an encoder
[19:58:05] <alex_joni> now that's extreme encoders :D
[19:58:14] <alex_joni> probably 2-3 counts/step
[19:58:19] <cradek> yes at least
[19:58:19] <skunkworks> I am saying the microstep may not actually move the stepper. It might take 2 or more before the stepper actaully has movement.
[19:58:35] <alex_joni> skunkworks: right
[19:58:40] <cradek> that's true I hadn't thought about microstepping
[19:58:41] <skunkworks> maybe at higher speeds it is smoother. so not a problem.
[19:59:07] <cradek> I'm not saying anyone should run out and try to do this
[19:59:18] <cradek> but it would be fun to play with if you had the appropriate hardware
[19:59:36] <alex_joni> cradek: meaning hardware counters for the encoders
[19:59:41] <cradek> yes
[20:00:06] <alex_joni> but slowing down might not be enough
[20:00:16] <alex_joni> say you lost a step..
[20:00:27] <alex_joni> slowing down won't bring that step back
[20:01:54] <cradek> that's also true, that error would persist forever
[20:02:18] <alex_joni> but maybe if you do it like you describe, the lost step won't ever get to happen
[20:02:19] <cradek> let's forget I brought up the half-baked idea
[20:02:30] <alex_joni> this will autocorrect itself before lost steps happen
[20:02:41] <cradek> yes that would be ideal
[20:02:59] <cradek> I guess at the extreme case you would wait until the motor is in position before making the next step
[20:03:17] <cradek> if the coils are activated properly it WILL eventually make it there (you can't lose the step)
[20:03:26] <jepler> I heard something at fest about treating the stepper motor as a 200-pole servo motor...
[20:03:27] <cradek> if it doesn't, you're stuck and it's best to stop anyway
[20:03:35] <pier_casa> what about counting encoder's step forgetting stepper steps? (rubbish?)
[20:03:50] <jepler> I think that's basically where you're going here
[20:03:52] <alex_joni> pier_casa: rubbish.. because it's highly likely you'll stall it
[20:04:00] <alex_joni> jepler: probably so
[20:04:58] <pier_casa> alex_joni: could you please explain the stall concept?
[20:05:41] <alex_joni> pier_casa: making a stepper move to fast it will lose capability to rotate
[20:05:53] <alex_joni> and just sit there moving one step forward and back
[20:05:57] <alex_joni> that's stalling
[20:06:01] <pier_casa> ok
[20:11:38] <pier_casa> today happened something odd when drilling a 1mm hole in a aluminium bar
[20:11:55] <pier_casa> perhaps someone coud help me with chemistry
[20:12:14] <pier_casa> the drill bit went blunt
[20:12:28] <pier_casa> in a peculiar way....
[20:12:46] <pier_casa> the first hole went through ok,
[20:13:12] <pier_casa> I then put a bit brass pin in the hole
[20:13:35] <pier_casa> and then tried to make a second hole
[20:13:59] <pier_casa> as soon as the rotating drill bit aproached the aluminium
[20:14:47] <pier_casa> sparks stareted coming out.... the drill bit got flat and a black spot appeared on the aluminium
[20:15:58] <pier_casa> does it have something to do with electronegativity? did that ever happen to any of you?
[20:16:37] <Bo^Dick> can i be sure that this is a cap and that it is 0.022µF?
http://www.carmi.se/misterstarshine/img/cap.gif
[20:16:40] <cradek> all that comes to mind is how easy it is to overheat tiny drills
[20:16:57] <pier_casa> cradek: nope
[20:17:02] <cradek> Bo^Dick: yes
[20:17:10] <Bo^Dick> thanks
[20:17:21] <pier_casa> it hardly touched the surface
[20:17:42] <cradek> have never seen that then
[20:17:57] <alex_joni> pier_casa: odd.. but it sounds like a current leak
[20:18:00] <pier_casa> I wanted to take a picture of it
[20:18:23] <pier_casa> from the tool?
[20:18:35] <alex_joni> either electrostatic (maybe had some cloth or hair in the spindle)
[20:18:42] <alex_joni> or dust or similar
[20:18:47] <cradek> true I wonder if your spindle was live wrt the work
[20:19:07] <alex_joni> I imagine a few k RPM could generate some electrostatic energy
[20:19:12] <cradek> seems like that would be hard to get with a metal machine
[20:19:14] <pier_casa> when I removed the brass pin the sparks wouldn't come out
[20:19:42] <alex_joni> pier_casa: was the aluminum you were drilling isolated from the rest (using wood or plastic as the machine bottom)?
[20:20:10] <skunkworks> pier_casa: what rpm was the spindle?
[20:20:24] <pier_casa> no... it was hold in place in my lathe's chuck. Then I put the pbras pin back in the hole and the
[20:20:41] <pier_casa> sparks started again
[20:21:16] <alex_joni> was the brass pin touching anything?
[20:21:17] <pier_casa> skunkworks: I don't know... few thousands...
[20:21:32] <alex_joni> except the part of course..
[20:21:38] <pier_casa> alex_joni: no... it was simply inserted in the alu piece
[20:22:11] <pier_casa> skunkworks: minilor drill tool 12V
[20:22:25] <skunkworks> sure sounds like an electrical issue.
[20:22:25] <pier_casa> skunkworks: 12V cc
[20:23:25] <pier_casa> then I removed the piece from the chuck but holded it in the steady
[20:23:37] <skunkworks> how is the drill run - batteries?
[20:24:01] <pier_casa> skunkworks: pc supplier
[20:24:33] <skunkworks> hmm. Can you check the contenutity of the bit to the +/- power of the drill?
[20:24:36] <pier_casa> the stedy, again, has got brass ends
[20:24:51] <pier_casa> skunkworks: I'll do that
[20:25:38] <pier_casa> I am positive there must be something related to alu/brass contact and elecricity leakage
[20:25:54] <skunkworks> sounds like you stubled upon an edm :)
[20:26:20] <pier_casa> skunkworks: hehehe my next project
[20:30:56] <alex_joni> good night all
[20:31:09] <jepler> 'night alex
[20:31:10] <pier_casa> night all
[20:33:16] <pier_casa> I'll try and ask some collegue who teaches chemistry at school tomorrow.
[20:33:20] <pier_casa> night all
[20:34:51] <anonimasu> hi
[21:26:05] <skunkworks> bbl
[22:51:16] <anonimasu> 3hi
[22:51:20] <anonimasu> :)
[23:18:53] <kdibble> hi all
[23:38:32] <jmkasunich_> jmkasunich_ is now known as jmkasunich
{kind=link}
{kind=link}