Back
[00:56:59] <kdibble> hi all, anybody got time to help an idiot?
[01:24:41] <A-L-P-H-A> heh... measured everything on the part, and then proceeded to drill a 1/4" hole, where a 3/16 hole should have been. doh... now I gotta buy bigger rivets.
[01:56:19] <tomp> hello
[01:58:04] <tomp> mac, DaveE has a friend with a prob: a Japax 3F uv homing, could you talk to him? ( seems it runs but is at a constant tilt now )
[02:26:41] <A-L-P-H-A> know what I just realized... a center drill 00 is about the perfect size for drilling PCB boards.
[02:26:56] <A-L-P-H-A> stiff, small, readily available.
[02:27:17] <cradek> but, not carbide, so useless for FR4
[02:27:31] <A-L-P-H-A> cradek: you can get them in carbide.
[02:27:40] <cradek> cheaper than pcb drills?
[02:27:43] <A-L-P-H-A> I'm not isolation milling them, just drilling them.
[02:28:03] <A-L-P-H-A> haven't gotten to the point of isolation milling.
[02:28:05] <cradek> is the center on a center drill long enough to go through a .062 board?
[02:28:19] <cradek> seems like they're pretty darn short
[02:28:29] <A-L-P-H-A> http://www.i-logic.com/utilities/CenterDrills.htm
[02:28:37] <A-L-P-H-A> my board media is pretty thin
[02:28:40] <A-L-P-H-A> let me get my calp.
[02:28:41] <cradek> ah
[02:29:15] <cradek> if it's over about .020 I bet you're out of luck
[02:29:33] <A-L-P-H-A> my board media says it's 0.020.
[02:29:37] <jmkasunich> hi guys
[02:29:40] <A-L-P-H-A> err. 0.0215
[02:29:41] <cradek> cool
[02:29:43] <cradek> hi jmk
[02:29:48] <A-L-P-H-A> some parts are 0.022.
[02:29:51] <A-L-P-H-A> hi jmkasunich
[02:30:20] <A-L-P-H-A> a center drill of 00 would be good enough as well.
[02:31:21] <cradek> what's up jmk?
[02:31:33] <jmkasunich> not much
[02:31:34] <jmkasunich> tired
[02:31:41] <A-L-P-H-A> these boards are only running data.. and a +5V line... low amps... as it's only a 7805 rated 0.5amp
[02:32:13] <cradek> I've never used that thin stuff, always the .062 FR4
[02:32:14] <A-L-P-H-A> in my head, I thinking copper thicknesses.
[02:32:21] <A-L-P-H-A> 0.05mm thickness...
[02:32:22] <jmkasunich> let's see.... work on sampler... go to sleep.... decisions decisions
[02:32:43] <cradek> Start new project at 10:30pm? [OK] [Cancel]
[02:32:54] <jmkasunich> I started it yesterday
[02:33:34] <A-L-P-H-A> omg carbide endmills are expensive.
[02:33:46] <cradek> heh use pcb drills
[02:33:51] <A-L-P-H-A> hmm... maybe I will stick with a number #60 drill bit.
[02:33:55] <cradek> come in any diameter and last forever
[02:34:05] <A-L-P-H-A> cradek: I also don't have super highspeeds.
[02:34:18] <cradek> high speed does help for that little stuff
[02:41:35] <jmkasunich> fsckit, sleep wins
[02:41:37] <jmkasunich> goodnight all
[02:41:40] <A-L-P-H-A> cradek: this seem like a good deal?
http://cgi.ebay.com/100-Micro-Carbide-Drill-Bits-Bit-PCB-Jewelry-CNC_W0QQitemZ330036081077QQihZ014QQcategoryZ58218QQrdZ1QQcmdZViewItem
[02:42:48] <A-L-P-H-A> good night jmkasunich
[02:46:26] <cradek> A-L-P-H-A: they're all too small for many things
[02:46:32] <A-L-P-H-A> true.
[02:46:43] <cradek> I've never used smaller than #75 which I use for vias (24 ga wire iirc)
[02:47:04] <A-L-P-H-A> let me check what my smallest bit is
[02:47:10] <cradek> I use #69 for most things like dip pads, 1/4w resistors etc
[02:47:27] <cradek> and that's a little on the small side (on purpose)
[02:47:48] <Jymmm> cradek why's that?
[02:47:51] <A-L-P-H-A> I pretty much used a #60 for everything, except for some bigger stuff.
[02:48:02] <A-L-P-H-A> and I think I lost my #60.
[02:48:08] <A-L-P-H-A> :(
[02:48:23] <A-L-P-H-A> oh well... a ten pack is cheap anyways
[02:48:29] <cradek> why's what?
[02:48:41] <Jymmm> cradek: little on the small side (on purpose)
[02:49:05] <cradek> oh
[02:49:15] <cradek> the parts stay on the board better for soldering, plus there's more pad left over
[02:49:25] <Jymmm> ah, ok. makes sense.
[02:50:14] <A-L-P-H-A> cradek: I just solder the shorter stuff first, and move up till the tallest.
[02:51:14] <Jymmm> I got a KW/h meter today. Nothing fancy, can handle up to 1800VA (iirc)
[02:51:35] <A-L-P-H-A> Jymmm: what are you measuring?
[02:52:20] <Jymmm> A-L-P-H-A: Just load of things. Wanted one for years but could never justify buying one. Got this one for free.
[02:52:54] <A-L-P-H-A> oh sweet
[02:53:19] <Jymmm> Mostly just want to see what things are really sucking the power; crt's, fans, etc
[02:53:50] <A-L-P-H-A> fuck www.busybeetools.ca... $1.49CDN for a #60.
[02:56:49] <cradek> is that for carbide with 1/8 shank? if so it's pretty cheap
[02:56:55] <A-L-P-H-A> no.
[02:57:02] <A-L-P-H-A> straight shank, hss, jobber bit.
[02:57:08] <A-L-P-H-A> import!
[02:57:18] <A-L-P-H-A> I remember them being $0.79
[02:57:24] <A-L-P-H-A> when'd did they double?
[02:57:25] <A-L-P-H-A> man.
[02:57:45] <cradek> the pcb drills I buy are around USD2.35 in small quantity (<10)
[02:58:04] <cradek> http://www.thinktink.com/cgi-bin/carbide.cgi?page=imperial&start=128&step=20
[02:58:27] <A-L-P-H-A> what's a ring? size ring?
[02:58:47] <Jymmm> a lil plastic ring that indicates the size of the bit.
[02:58:53] <A-L-P-H-A> see... $2.35 I could understand if being carbide, and all.
[02:58:56] <cradek> it's the plastic ring that has the size marked on it, and can also be used to set the length in the collet
[02:59:09] <cradek> it's the 1/8 in shank that's so important
[02:59:22] <cradek> and like I said, they last and last
[02:59:44] <cradek> when drilling by hand you always break them off, but in cnc they drill forever
[03:03:32] <A-L-P-H-A> hmm. cool.
[03:03:36] <A-L-P-H-A> I'll see.
[03:05:57] <cradek> A-L-P-H-A: I use very few sizes. I keep around: .0625 (carbide end mill is fine), .046, .035, .029, .021
[03:06:14] <cradek> surprisingly, these really do cover most parts quite well
[03:06:55] <cradek> I strongly suggest that before you buy any drills, you go through your parts bin and measure pins on stuff
[03:07:42] <cradek> if you choose carefully like this you can easily get equipped for under $50
[03:08:05] <A-L-P-H-A> well... so far, I've just drilled #60, and shoved stuff in, and bent the pins to hold them in place. I am doing this manually.
[03:08:26] <cradek> what's #60 in inches?
[03:08:40] <A-L-P-H-A> #60 = 0.0400
[03:08:48] <cradek> oh, that's huge then
[03:09:02] <cradek> on the boards I make that would often take the whole pad
[03:09:15] <cradek> you must be doing very low density stuff
[03:09:59] <cradek> I think even wire wrap sockets (the big square pins) will go in a .035 hole
[03:10:34] <A-L-P-H-A> my wire terms are .75mm, while the drill is 1.02mm
[03:10:39] <A-L-P-H-A> #60=1.02mm
[03:11:18] <A-L-P-H-A> my caps, are 2.5mm spacing, 5mm dia... those wires are .48mm
[03:11:48] <A-L-P-H-A> 1n4001 = 0.79mm
[03:12:06] <cradek> yeah those are big
[03:12:29] <A-L-P-H-A> led legs, 0.6mm
[03:12:50] <cradek> if they're square, be sure to measure the diagonal, not the flats
[03:13:08] <A-L-P-H-A> yeah, I did. :)
[03:13:16] <cradek> ok, obvious, but an easy mistake to make
[03:13:19] <A-L-P-H-A> header pins are 0.85mm
[03:14:02] <A-L-P-H-A> my other style of wire terms are 0.9mm
[03:14:57] <A-L-P-H-A> I should probably get some #68 drill bits.
[03:15:10] <A-L-P-H-A> which are 0.79mm / .0310"
[03:15:32] <cradek> yeah that sounds like what you might want
[03:15:53] <cradek> like I said, I use #69 for most stuff, and it's just a tad small
[03:16:10] <cradek> #69 = .0292 iirc
[03:16:16] <A-L-P-H-A> yeah
[03:16:23] <cradek> f-cking americans
[03:16:43] <A-L-P-H-A> #68 = 1/32"
[03:16:49] <A-L-P-H-A> pretty standard sized
[03:17:10] <cradek> .0310 != 1/32
[03:17:12] <A-L-P-H-A> #68 = 0.0310... 1/32 = 0.0313
[03:17:27] <A-L-P-H-A> cradek: like I can measure 0.0003"
[03:17:35] <cradek> .00025
[03:17:52] <cradek> (but point taken)
[03:22:27] <A-L-P-H-A> oh hey... this isn't a bad deal.
http://www.littlemachineshop.com/products/product_view.php?ProductID=2318
[03:23:07] <A-L-P-H-A> but I already have a height surface gauge.
[03:23:36] <cradek> that must not be something I need very often
[03:24:55] <A-L-P-H-A> holy crap this is expensive.
[03:24:55] <A-L-P-H-A> http://www.littlemachineshop.com/products/product_view.php?ProductID=1927
[03:25:06] <A-L-P-H-A> I have the HF version... cost me I think $80
[03:26:39] <A-L-P-H-A> this seems expensive to me for what it is...
http://www.littlemachineshop.com/products/product_view.php?ProductID=1943
[04:59:12] <A-L-P-H-A> Jymmm: how's the apt hunting going?
[05:04:13] <Jymmm> It's goin... WE think we have a 2br 1ba house with garage
[05:11:39] <A-L-P-H-A> cool.
[05:11:50] <A-L-P-H-A> Garage is good... :) more storage.
[05:11:56] <A-L-P-H-A> you can put your machines in there... :)
[05:12:38] <A-L-P-H-A> same area? or another area?
[05:12:44] <A-L-P-H-A> willing to move further out?
[05:14:34] <Jymmm> Not same neighborhood, but nice area about 10 minutes away. Yeah even a sink in the garage... good for wiid finishing work.
[05:14:43] <Jymmm> wood
[05:14:48] <A-L-P-H-A> cool.
[05:14:56] <A-L-P-H-A> Jymmm: got any more photos of some of your work?
[05:16:18] <Jymmm> not really, I think I've already shown you the jest of what I've done.
[05:16:20] <A-L-P-H-A> when you moving?
[05:16:29] <A-L-P-H-A> Jymmm: 'ight.
[05:16:31] <Jymmm> when it's all confirmed.
[05:16:41] <A-L-P-H-A> I need a new SD card... so I can use my old video cam...
[05:16:42] <A-L-P-H-A> :/
[05:16:56] <Jymmm> too small?
[05:17:12] <A-L-P-H-A> I don't think it has any onboard.
[05:17:22] <A-L-P-H-A> and I don't think it can hold more than 512.
[05:17:42] <Jymmm> ah, well 512MB isn't THAT small
[05:17:52] <A-L-P-H-A> no, it ain't....
[05:18:00] <A-L-P-H-A> but I also want a Cannon SD600.
[05:18:09] <Jymmm> ah
[05:18:33] <A-L-P-H-A> I really shouldn't buy ANYTHING... as I just paid my insurance in full for the year.
[05:19:13] <A-L-P-H-A> $18CDN for 512MB... not bad at all
[05:20:26] <A-L-P-H-A> hah. just realized I gave my sister my media reader as well.
[05:20:28] <A-L-P-H-A> damn it!
[05:22:46] <A-L-P-H-A> oh... damn.
http://canadacomputers.com/index.php?do=ShowProduct&cmd=pd&pid=010969&cid=990.218
[05:23:06] <A-L-P-H-A> I could just get like a few of those... and if I loose them... haha.
[05:26:07] <Jymmm> I like SD basically becasue my laptop has a builtin SD slot and I can carry phone book, keys, personal data on them easily.
[05:26:45] <A-L-P-H-A> yeah.
[05:26:48] <A-L-P-H-A> cheap now too
[05:26:49] <A-L-P-H-A> very cheap
[05:27:13] <Jymmm> And you can get the throw away (16MB or less) usually for the asking.
[05:27:32] <A-L-P-H-A> 128meg is less than a fourbucks coffee.
[05:27:43] <Jymmm> heh
[05:28:10] <Jymmm> $10 handling fee per order
[05:28:14] <A-L-P-H-A> local
[05:28:30] <A-L-P-H-A> it's 20 minutes drive... I can go for chinese around that area too
[05:37:27] <Jymmm> lol
[05:40:42] <ejholmgren> waka waka
[05:40:50] <A-L-P-H-A> mole
[06:05:57] <alex_joni> huh?
[06:27:25] <K`zan> Night folks
[09:20:58] <alex_joni> * alex_joni yawns
[10:05:53] <anonimasu> hello
[10:08:46] <alex_joni> hi
[10:21:02] <anonimasu> what's up?
[10:34:23] <alex_joni> boring stuff
[10:46:10] <alex_joni> it's raining outside.. and I have no urge to do anything :(
[11:16:49] <anonimasu> :(
[11:16:51] <anonimasu> same as here
[11:23:43] <alex_joni> yikes
[11:30:22] <ValarQ> i hope it rained here
[11:30:42] <ValarQ> to sunny here :(
[11:38:24] <anonimasu> I have a toolchanger design done :9
[11:38:30] <anonimasu> the spindle part :9
[11:38:32] <anonimasu> :)
[11:39:53] <Jymmm> anonimasu: We'll expect a complete working finished model in 72 hours.
[11:39:59] <anonimasu> LOL
[11:40:11] <anonimasu> I need to thread a locknut for my gear on the spindle..
[11:40:39] <Jymmm> anonimasu: No no, you dont understand... I'm not spekaing of JSUT the spindle, I mean THE WHOLE DAMN TOOL CHANGER!
[11:40:39] <anonimasu> that gives me the oppurtunity to add something to push aginst the drawbar when unscrewing the tool
[11:40:54] <anonimasu> ;)
[11:41:08] <Jymmm> anonimasu (but I never said it had to work again after the demo)
[11:41:24] <anonimasu> that kind of sucks :D
[11:41:27] <Jymmm> just a proof of concept =)
[11:41:38] <anonimasu> the only hard part about a toolchanger is getting it in place and getting it away afterwards
[11:41:44] <Jymmm> then you can go back and work out any bugs
[11:42:09] <Jymmm> mounting or actually changing a tool?
[11:42:20] <anonimasu> changing the tool..
[11:42:30] <Jymmm> what kind of machine?
[11:42:40] <anonimasu> my machine :)
[11:42:43] <anonimasu> mill
[11:43:12] <Jymmm> just have it slide in from the back
[11:43:27] <anonimasu> side or back..
[11:43:32] <anonimasu> I think side is the best
[11:43:42] <Jymmm> kinda like a coffee vending machine, but reverse
[11:43:48] <anonimasu> haha
[11:43:53] <Jymmm> seriously
[11:44:20] <anonimasu> I have a kind of idea..
[11:45:02] <anonimasu> the fork slides in from the side/whole changer arm..
[11:45:16] <Jymmm> you reach in to grab the cup. Instead of the cup being stationary (representing the spindle),
[11:45:33] <anonimasu> then flips the tool back and mounts the new tool..
[11:45:50] <Jymmm> the tool changer (representing your arm/hand) slides in from the rear
[11:45:54] <fenn> you need a swap arm too
[11:46:03] <anonimasu> yeah.. that's what Im pondering about getting there
[11:46:45] <fenn> http://fenn.freeshell.org/retrofest/dcp_0371.jpg <- on the mazak the swap arm moves up and down
[11:46:48] <anonimasu> I'd like to have 2 tool positions so I can keep the next tool in the changer
[11:46:58] <anonimasu> in the changer arm
[11:47:07] <anonimasu> yeah like that
[11:47:35] <anonimasu> I need to extend my spindle to do that
[11:47:43] <anonimasu> as I cant fit a arm thats long enough
[11:48:23] <anonimasu> seen the haas style changers?
[11:48:48] <fenn> nope
[11:48:53] <anonimasu> http://www.cuttingedgecnc.com/Movies/toolchange.wmv
[11:48:59] <anonimasu> I think I posted it befoer
[11:49:01] <anonimasu> before
[11:49:07] <fenn> yeah url sounds familiar
[11:49:53] <fenn> hard to get a good look at it
[11:50:03] <fenn> looks about like the way the mazak works, just faster
[11:50:29] <anonimasu> hm, if I settle for one tool in the changer it'll be easier..
[11:50:39] <anonimasu> that's probably fast enough :D
[11:50:44] <fenn> thats fun to watch on slo-mo
[11:52:15] <anonimasu> hehe
[11:53:26] <anonimasu> fenn: got any good idea about it?
[11:53:39] <fenn> um..
[11:53:59] <fenn> well, hydraulics since you've already got the pump and stuff
[11:54:21] <anonimasu> * anonimasu nods
[11:54:22] <fenn> i guess
[11:54:28] <anonimasu> that much I know :)
[11:54:33] <fenn> i dont know when to use hydraulics vs pneumatics
[11:54:43] <anonimasu> huydralisc when you need force..
[11:54:47] <anonimasu> in general
[11:55:02] <fenn> how much force to extract a toolholder from the spindle?
[11:55:04] <anonimasu> pneumatic stuff hardly goes over 8bar ever
[11:55:07] <anonimasu> nothing..
[11:55:15] <Jymmm> fenn: 20 tons
[11:55:15] <anonimasu> my drawbar will be doing it for me
[11:55:15] <fenn> nothing?
[11:55:19] <anonimasu> yeah..
[11:55:26] <fenn> ok
[11:55:41] <anonimasu> I'll have the drawbar screw the tool out
[11:55:48] <fenn> just make sure it isnt able to throw the toolholder across the room on accident
[11:56:03] <anonimasu> the changer?
[11:56:06] <fenn> yeah
[11:56:08] <anonimasu> ofcourse :)
[11:56:46] <fenn> the mazak had prox switches for each position of the arm
[11:56:50] <anonimasu> actually a small robot would be the best things
[11:56:54] <anonimasu> thing
[11:57:18] <fenn> yep a small robot could be really useful
[11:57:28] <fenn> load and unload parts and tools
[11:57:36] <anonimasu> though getting a decent payload is hard
[11:57:51] <fenn> not if you're making it
[11:58:01] <fenn> then you can make it slow and strong
[11:58:16] <anonimasu> hm..
[11:58:17] <anonimasu> yeah
[11:58:18] <fenn> they dont make too many slow robots
[11:58:40] <anonimasu> I saw some with a payload of 500kg :) in a magazine I got at work
[11:58:46] <anonimasu> not slow though
[11:58:53] <fenn> used for amusement park rides
[11:59:18] <anonimasu> seen the motoman robots+
[11:59:33] <anonimasu> http://www.motoman.com/
[12:00:24] <anonimasu> bleh large robot with 3kg payload
[12:00:28] <anonimasu> http://www.motoman.com/products/datasheets/HP3XF.pdf
[12:02:16] <fenn> what does "indirect cooling" mean?
[12:02:42] <fenn> for the controller
[12:02:54] <anonimasu> no idea at all :9
[12:03:01] <fenn> ouch
[12:03:07] <fenn> 500 degrees/sec rotation
[12:03:40] <fenn> i guess none of that means much without acceleration ratings
[12:04:15] <anonimasu> http://www.motoman.com/products/datasheets/HP6.pdf
[12:04:19] <anonimasu> that design is really nice
[12:04:49] <alex_joni> eekk .. motoman ;)
[12:04:57] <anonimasu> alex_joni: bad?
[12:06:20] <alex_joni> anonimasu: competitors :D
[12:06:24] <alex_joni> wouldn't say they are bad
[12:06:45] <alex_joni> anonimasu: but you have ABB closer
[12:06:45] <anonimasu> lol
[12:06:50] <alex_joni> at least for a while..
[12:06:57] <anonimasu> alex_joni: no $ for a robot..
[12:06:58] <anonimasu> :D
[12:07:18] <alex_joni> right
[12:07:20] <anonimasu> would emc run a robot like that?
[12:07:25] <anonimasu> *ponders*
[12:07:26] <fenn> poorly
[12:07:28] <alex_joni> anonimasu: after a while
[12:07:35] <alex_joni> fenn: how so?
[12:07:50] <alex_joni> you'd probably want another interpreter, as g-code sux for robots
[12:07:58] <fenn> no collision avoidance, no dynamic acceleration ratings
[12:07:59] <alex_joni> then you'd want something to talk CAN to the drives
[12:08:07] <alex_joni> collision avoidance is easy
[12:08:18] <fenn> ok
[12:08:19] <anonimasu> yeah just keep stuff out of the way..
[12:08:19] <anonimasu> ;)
[12:08:21] <alex_joni> fenn: usually it's done by ESTOP
[12:08:26] <fenn> hmm
[12:08:29] <alex_joni> big relay
[12:08:32] <alex_joni> fenn: honestly
[12:08:47] <fenn> the robot arm completes the estop circuit?
[12:08:51] <fenn> er
[12:08:58] <fenn> yeah
[12:09:13] <fenn> anyway..
[12:09:27] <alex_joni> the only "smart" collision detection is current limitation in the drives :D
[12:09:29] <alex_joni> and ferrors
[12:09:36] <fenn> emc doesn't do JOINT acceleration/velocity limits
[12:09:49] <alex_joni> well.. not very well
[12:09:51] <fenn> or at least that was the idea i got
[12:10:02] <alex_joni> but that's the same for comercial controls :P
[12:10:04] <anonimasu> so even if I'd build a robot i'd ve fscked.. :)
[12:10:06] <fenn> stepgen does joint limits
[12:10:12] <alex_joni> indeed
[12:10:14] <anonimasu> hehe
[12:10:24] <alex_joni> anonimasu: the robot you'll build is easy to drive with emc :D
[12:10:41] <fenn> yeah usually the hard part is deciphering the weird serial protocols right?
[12:10:51] <alex_joni> fenn: CAN nowadays
[12:11:02] <fenn> what about old surplus robots?
[12:12:19] <fenn> anonimasu: there's also orocos which was designed for 6dof robots from the ground up
[12:12:27] <fenn> i dont know how complete it is though
[12:13:08] <anonimasu> hm..
[12:14:02] <anonimasu> *yawns*
[12:15:03] <anonimasu> seems like orcos would be a shitload of work
[12:16:22] <alex_joni> anonimasu:
http://cgi.ebay.com/Unimate-Puma-550-Robot-Arm-on-stand-with-teach-pendant_W0QQitemZ3874044068QQihZ017QQcategoryZ50924QQssPageNameZWD1VQQrdZ1QQcmdZViewItem
[12:16:49] <fenn> unimates are so ugly though
[12:17:15] <alex_joni> yeah, but you have kins written for them :D
[12:17:44] <alex_joni> put some G340's on this, and it should work quite well
[12:17:44] <skunkworks> cool
[12:17:49] <anonimasu> heh
[12:18:07] <alex_joni> ROFL "We are in the Desert Southwest so items may need dusting/cleaning when they arrive."
[12:18:57] <anonimasu> I'd rather build a robot.
[12:19:15] <anonimasu> the design part isnt that fancy, but the motors are pricey..
[12:19:47] <alex_joni> logger_aj: bookmark
[12:19:47] <alex_joni> See
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-10-05#T12-19-47
[12:20:13] <alex_joni> anonimasu: like I said.. a recent robot is up to 10k$ / joint
[12:20:18] <alex_joni> motors/drives/control
[12:20:43] <anonimasu> that's really horrid unless you do production..
[12:20:46] <fenn> anonimasu: have you been looking on ebay for motors an such?
[12:20:55] <anonimasu> im in sweden
[12:21:11] <anonimasu> nobody ships here
[12:21:13] <fenn> hey maybe you could use hydraulics :P
[12:21:18] <anonimasu> :P
[12:21:19] <skunkworks> anonimasu: just ask.
[12:21:36] <fenn> dont you have piles of hydraulics actuators lying around?
[12:21:42] <anonimasu> nope
[12:21:45] <skunkworks> I know I have shipped over seas if I am asked
[12:21:48] <anonimasu> they are all oversize
[12:22:03] <anonimasu> ;)
[12:22:06] <skunkworks> believe me - don't go hydrolics.
[12:22:06] <fenn> you can run tendons to the robot
[12:22:14] <anonimasu> skunkworks: I know :D
[12:22:29] <anonimasu> skunkworks: positioning huydralics are a hell
[12:22:51] <skunkworks> that is what is on our big nc mill. yeck.
[12:23:06] <anonimasu> ouch
[12:23:07] <skunkworks> (granted it did work)
[12:23:43] <anonimasu> if you have large stuff it works well..
[12:24:02] <anonimasu> I tried to do positioning with a 11cm cylinder ;)
[12:24:33] <skunkworks> this was k&t precision version - it actually did .0001 (scary huh)
[12:24:52] <anonimasu> yeah
[12:25:05] <anonimasu> that's very good :)
[12:25:47] <skunkworks> hydrolic motors - not cylinders.
[12:26:24] <skunkworks> with cool proportional valves that had little vibrators in them to keep them from sticking :)
[12:26:32] <anonimasu> lol
[12:26:42] <anonimasu> that's neat :D
[12:26:56] <skunkworks> well - if thats all you have....
[12:27:26] <anonimasu> yeah
[12:27:38] <anonimasu> I wonder if mariss will start doing brushed drives
[12:28:03] <anonimasu> anytime soon
[12:29:06] <skunkworks> I thought he had a brushed drive - step/dir in
[12:29:30] <skunkworks> do you mean brushless?
[12:29:38] <anonimasu> for brushless motors
[12:29:44] <anonimasu> yeah
[12:29:45] <anonimasu> typo
[12:37:19] <Jymmm> alex_joni: know of any ro to en translaters?
[12:37:24] <anonimasu> * anonimasu has passed on several motors because he's had no clue about drives
[12:39:22] <alex_joni> Jymmm: humans?
[12:39:45] <Jymmm> alex_joni :
http://www.radioamator.ro/articole/view.php?id=248
[12:40:53] <Jymmm> alex_joni: You're human (most of the time), so start translating =)
[12:40:57] <alex_joni> :P
[12:41:03] <alex_joni> GIYM
[12:41:07] <Bo^Dick> logger_aj: !thislog
[12:41:07] <Bo^Dick> I'm logging. I don't understand '!thislog', Bo^Dick. Try /msg logger_aj help
[12:41:15] <alex_joni> logger_aj: bookmark
[12:41:15] <alex_joni> See
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-10-05#T12-41-15
[12:41:22] <Bo^Dick> thx
[12:41:30] <Jymmm> alex_joni ?
[12:41:39] <alex_joni> google it
[12:41:56] <Jymmm> alex_joni been there, done that.
[12:42:04] <alex_joni> nothing on wikipedia?
[12:42:19] <fenn> intertran
[12:42:31] <alex_joni> http://en.wikipedia.org/wiki/Maidenhead_Locator_System
[12:42:42] <fenn> http://www.tranexp.com:2000/Translate/result.shtml
[12:43:16] <Jymmm> alex_joni: Yes, that's how I got the url I just gave you.
[12:43:52] <alex_joni> Jymmm: sorry.. a bit busy to translate all that :)
[12:44:19] <Jymmm> alex_joni thats whay I asked if you have a ro to en trans, google doens't have one.
[12:44:26] <alex_joni> not really
[12:44:27] <Bo^Dick> i saw a link to a allegro stepper driver chip. can someone remember who gave it to me
[12:45:19] <skunkworks> http://www.cnczone.com/forums/showthread.php?t=24699&highlight=stepper+motor+chip
[12:45:43] <Jymmm> Bo^Dick it's the same one that xylotex uses btw
[12:45:53] <Bo^Dick> cool
[12:46:55] <Bo^Dick> i'm working on a design that has auto adjustable mixed decay
[12:48:08] <Jymmm> Bo^Dick: Yeah, but does it have a built in coffee maker?!
[12:48:25] <Bo^Dick> not yet
[12:48:35] <Jymmm> well, wth?!?!?! lol
[12:48:52] <Bo^Dick> i'll meet any demands
[12:49:25] <Jymmm> fine, have it ready in two minutes.
[12:49:56] <jepler> Jymmm: that thread is about a new chip, not the one in the xylotex.
[12:49:57] <fenn> jymmm you're a tough boss. i'd like to invest in your company
[12:51:24] <jepler> Jymmm: among other advantages, it allows higher voltages (up to 50V) and currents (up to the limit of the external MOSFETs chosen)
[12:52:30] <Bo^Dick> does the A3986 support the anti-resonance feature?
[12:56:42] <Bo^Dick> i'm not sure how that works but i'd like to invoke that feature to my design
[12:57:13] <Bo^Dick> since i'm using a microcontroller i could maybe make some adjustments to meet that
[12:58:00] <Bo^Dick> maybe the resonance-compensation involves a change between the two phases?
[12:58:27] <Bo^Dick> if that would be the case it would be pretty simple to implement with the microcontroller
[12:59:58] <Jymmm> jepler: ah, very cool! Didn't realize the MOSFETS were external.
[13:00:16] <Jymmm> jepler: Please insert credit card here --> [ ]
[13:01:12] <SWPadnos> 1234 5678 9012 3456, expiration 13/08
[13:01:14] <SWPadnos> I'll take two
[13:02:39] <Jymmm> lol, morning SWPadnos
[13:03:17] <jepler> bbl
[13:05:19] <anonimasu> iab
[13:05:31] <SWPadnos> hmmm. morning + SWPadnos don't mix well
[13:06:06] <alex_joni> hi SWPadnos
[13:06:11] <SWPadnos> hi
[13:06:21] <Jymmm> SWPadnos + prime rib
[13:06:24] <Jymmm> better?
[13:06:30] <SWPadnos> mmmmm - prime rib
[13:07:17] <Jymmm> I'll take that as a yes =)
[13:08:21] <SWPadnos> well, it does depend on the prime rib, but yes
[13:11:07] <skunkworks> nothing really beats a good fish fry though
[13:12:33] <skunkworks> working my way around eagle again.. Maybe today I will try to actually draw a componant.
[13:12:37] <SWPadnos> except for really good prime rib
[13:12:45] <SWPadnos> or sushi
[13:12:51] <SWPadnos> or Korean
[13:13:14] <SWPadnos> hmmm - I guess the Friday Night Fish Fry is an acquired taste ;)
[13:13:36] <skunkworks> yah. its mainly anything breaded and deep fried.
[13:13:48] <SWPadnos> heh - well that I can agree with :)
[13:17:55] <Bo^Dick> its foolish to design my own stepper friver isnt it
[13:18:16] <SWPadnos> if your measure of foolishness is economic, then yes
[13:18:16] <Jymmm> Bo^Dick: Not really... if you have the time
[13:18:31] <SWPadnos> if your measure of foolishness relates to learning, then no
[13:19:40] <Bo^Dick> btw, what do they cost these A3986?
[13:20:33] <SWPadnos> $3.04 in quantities of 5000
[13:20:50] <Bo^Dick> i'm NOT intrested in such quantities
[13:20:59] <SWPadnos> heh - me either ;)
[13:21:16] <Bo^Dick> so what do they go for each
[13:21:39] <alex_joni> 5000$ in quantities of 3.04
[13:21:53] <SWPadnos> dunno. Mouser doesn't seem to have them, and digikey seems to be offline
[13:22:11] <Bo^Dick> they're pretty intresting parts
[13:22:25] <Bo^Dick> but that also depends on the price
[13:23:04] <SWPadnos> I'd think that the single price would be 2-3x the quantity price, but it could be more
[13:24:08] <SWPadnos> actually, there's a CNCzone comment that says they're about $5.00 at DigiKey
[13:24:19] <Bo^Dick> that's pretty cheap
[13:24:34] <SWPadnos> then add external MOSFETs, I think
[13:24:40] <Bo^Dick> yeah
[13:24:50] <SWPadnos> still fairly cheap though
[13:24:51] <Bo^Dick> if someone could spy on the zylotex
[13:25:06] <Bo^Dick> btw, would the mosfets be more expensive?
[13:25:23] <SWPadnos> that depends on the voltage and current you'd want
[13:25:36] <Bo^Dick> one allegro part would require 8 mosfets right?
[13:25:58] <SWPadnos> yay - digikey seems to be (almost) back online
[13:26:24] <Bo^Dick> there is still one particular advantage with my design
[13:26:27] <skunkworks> 5.12 in quantities of 1 at digikey.
[13:26:58] <Bo^Dick> since i'm programming a µc in assembler i could implement code to deal with the anti-resonance feature (assuming allegro hasn't already done this)
[13:27:30] <SWPadnos> a microcontroller is a blessing and a curse in this type of situation
[13:27:36] <Bo^Dick> the resonance-phenomenon is quite undesirable in CNC apps right?
[13:27:49] <Jymmm> in any app
[13:27:55] <Jymmm> I would think
[13:27:57] <SWPadnos> you can do anything you want in the code (more or less), but everything you do takes more time and slows down the max step rate
[13:28:00] <Bo^Dick> why would it be a curse?
[13:28:26] <Bo^Dick> that's true although the ATmega8515 has 16Mips
[13:28:37] <SWPadnos> well, if you add a resistor and acapacitor to the board, you get a filter that runs in realtime, and doesn't affect (for the most part) anything else on the board (except for the filtering function)
[13:28:53] <SWPadnos> if you want to do a filter in a microcontroller, you add code to do the filtering, and it executes sequentially
[13:29:07] <SWPadnos> that affects the timing of other code in the system
[13:29:21] <SWPadnos> a microcontroller can do just about anything, given enough time
[13:29:28] <SWPadnos> hardware just runs all the time
[13:29:46] <Bo^Dick> this is why i use asm rather than C
[13:29:55] <Bo^Dick> i consider this application time-critical
[13:29:56] <SWPadnos> I always use asm, it doesn't matter
[13:30:34] <SWPadnos> that only pushes the line between success and failure, it doesn't eliminate it
[13:30:43] <Bo^Dick> but i can't say in advance that i know for sure that the µc will provide a desirable step-rate. i just hope this is gonna be the case
[13:33:15] <Bo^Dick> well i'll have to read up on the resonance subject regarding stepper motors
[13:33:27] <Bo^Dick> so far it has been tricky to find detailed information about it
[13:34:12] <Bo^Dick> i've heard that this subject is the critical point between good and bad stepper drivers
[13:34:30] <Bo^Dick> so it's really funny there is so little talking about it
[13:34:58] <SWPadnos> it'sa pain in the ass to implement, I gather
[13:35:27] <Bo^Dick> still it's a guess
[13:35:44] <Bo^Dick> prolly a good guess regarding the circumstances
[13:36:24] <Bo^Dick> it's got to be something special about it since allegro has neglected it
[13:37:10] <SWPadnos> I think basically everyone has neglected it except for Mariss
[13:37:21] <Bo^Dick> that's really strange
[13:37:42] <SWPadnos> it's probably there in more expensive drives, but I don't know
[13:37:57] <SWPadnos> it's not so strange if you think about the market for stepper drives
[13:38:06] <Bo^Dick> if it makes the drivers better and more reliable the subject really would deserve more attention
[13:38:31] <SWPadnos> for the most part, large motors haven't been steppers for years. they changed to DC servo, then AC servo (at least in the CNC world)
[13:38:57] <SWPadnos> hobby-grade drives need to be inexpensive, and the compensation isn't as critical
[13:39:33] <SWPadnos> the geckodrives sit on the edge between hobby and pro drives, so some hobbyists or light industrial users may get them, and need the compensation
[13:39:43] <Bo^Dick> so however the anti-resonance is implemented it's likely to affect the price of the drive?
[13:39:59] <SWPadnos> add components = add cost = increase price
[13:40:22] <Bo^Dick> now i'm talking about large changes in price not marginally differences
[13:41:20] <SWPadnos> it either changes the price due to cost, or it cahnges the price due to marketing (ie, better feature = you can charge more)
[13:41:54] <SWPadnos> oh - as a cost, it may not change much - I think the circuit is only a dozen or so components
[13:43:04] <Bo^Dick> it doesn't feel 100% sensible to me
[13:43:45] <Bo^Dick> to make a drive as good as possible to the lowest possible price, wouldn't that be most attractive product to buy for the consumer?
[13:45:29] <SWPadnos> good question. why haven't you bought a Geckodrive then?
[13:45:50] <Bo^Dick> it has only 1/10 stepping
[13:46:00] <Bo^Dick> fixed that is
[13:46:03] <SWPadnos> no, it has 1/10, 1/5, 1/2 and 1/1
[13:46:09] <SWPadnos> if you get the PLL board (the G210)
[13:46:12] <Bo^Dick> not the cheapest gecko
[13:46:32] <SWPadnos> ok, so there's an amount you're willing to pay for a certain set of features
[13:46:52] <SWPadnos> you just happen to want more features and/or a lower price than anything currently on the market
[13:46:56] <Bo^Dick> if some gecko would ever be intresting to me it would be their cheapest namely the one that goes for the "bargain" price of 114$ each
[13:47:43] <SWPadnos> if you count your time at $1/hour, and the time of people here at the same rate, then you could have bought several geckos for the time spent designing your drive
[13:47:44] <Bo^Dick> observe that this is not the price for a three axis system, oh no, it's the price for only one driver
[13:48:05] <SWPadnos> and $1/hour is significantly lower than my consulting rate ;)
[13:48:42] <Bo^Dick> so a three axis gecko system is almost 350$
[13:48:43] <SWPadnos> so as i said, if you want to learn something, then designing your own drive may be worthwhile, but if you're doing it for monetary reasons only, it's a loss
[13:48:47] <Bo^Dick> is that a bargain?
[13:49:11] <SWPadnos> well, you'd get a system that has mid-band resonance compensation, plus things like a warranty
[13:49:22] <Bo^Dick> i'm not even sure the motors themselves are that expensive
[13:49:50] <Bo^Dick> well you're right at one point, i'll get the midband resonance
[13:50:17] <Bo^Dick> but my driver can step 1/1, 1/2, 1/4, 1/8, 1/16 and 1/32
[13:50:29] <SWPadnos> plus documentation, support, warranty, and the knowledge that if something is wrong, it's probably in your wiring, not the drive
[13:50:29] <Bo^Dick> that is definetly more than what the cheapest gecko can
[13:51:06] <Bo^Dick> btw, has the cheapest gecko mixed decay?
[13:51:17] <SWPadnos> dunno
[13:54:15] <Bo^Dick> one thing is for sure, if i manage to get through the stuff with resonance, my driver will without doubt be cheaper and better than the gecko
[13:54:25] <Bo^Dick> but now it's all up to that detail
[13:55:17] <SWPadnos> I hope you manage it :)
[13:56:38] <Bo^Dick> besides this, since all this has gotten me into the world of µc:s i could also start developing a frequency conformer for brushless motors and they are really expensive on the market
[13:58:15] <SWPadnos> what microcontroller are you using?
[13:59:39] <Bo^Dick> ATmega8515
[13:59:44] <Bo^Dick> very nice device
[14:00:12] <SWPadnos> yep
[14:12:30] <fenn> hey SWP how come your bridgeport is still in pieces?
[14:13:33] <fenn> if it's mounts that are bugging you, just make some crappy temporary ones out of hollow rectangular section
[14:14:56] <NickServ> This nickname is owned by someone else
[14:14:56] <NickServ> If this is your nickname, type /msg NickServ IDENTIFY <password>
[14:20:38] <fenn> this may be interesting:
http://www.youtube.com/watch?v=NZNTgglPbUA
[14:22:51] <alex_joni> my perl skills are weak :(
[14:22:57] <alex_joni> logger_aj: bookmark
[14:22:57] <alex_joni> There is no log URI
[14:23:04] <alex_joni> now I borked it for good :D
[14:27:08] <NickServ> This nickname is owned by someone else
[14:27:08] <NickServ> If this is your nickname, type /msg NickServ IDENTIFY <password>
[14:27:10] <SWPadnos> fenn, I'm lazy ;)
[14:27:14] <alex_joni> sorry bout the toggling :)
[14:27:39] <alex_joni> logger_aj: bookmark
[14:27:39] <alex_joni> I'm feeling lazy .. but here's the log anyways:
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-10-05#T14-27-39
[14:27:48] <alex_joni> logger_aj: search
[14:27:48] <alex_joni> Try this address for searching the logs:
http://81.196.65.201/cgi-bin/search.cgi
[14:27:48] <SWPadnos> heh
[14:27:57] <SWPadnos> logger_aj, help
[14:28:22] <fenn> logger_aj: chump a
[14:28:22] <fenn> A:See [
http://81.196.65.201/irc/irc.freenode.net:6667/emc/2006-10-05#T14-28-22|discussion]
[14:28:46] <SWPadnos> weird - I just got Alex's 3 CVS commit messages
[14:28:54] <alex_joni> SWPadnos: ??
[14:29:00] <SWPadnos> from October 3
[14:29:05] <alex_joni> wild :)
[14:29:11] <SWPadnos> yeah
[14:29:13] <alex_joni> heh.. me too
[14:29:24] <alex_joni> might be the lists were down?
[14:29:28] <SWPadnos> so, I've seen a fair amount of discussion about "alter" - where is that?
[14:29:31] <SWPadnos> could be
[14:29:37] <alex_joni> didn't see anything on emc-devel or emc-users in the last days
[14:29:44] <alex_joni> SWPadnos: it's an alter ego
[14:29:51] <alex_joni> kidding.. not quite sure
[14:30:06] <SWPadnos> me either. though I thought there might be a problem with my mail server, since I had zero emails from a 6-hour period last night
[14:30:28] <SWPadnos> well, one of your commit messages says that you didn't change alter, needs discussion ...
[14:30:34] <alex_joni> double alter;/* additive dynamic compensation */
[14:30:48] <SWPadnos> in usrmotintf?
[14:30:53] <SWPadnos> err - command.c
[14:31:02] <alex_joni> no.. in emc/motion/motion.h
[14:31:20] <alex_joni> int usrmotAlter(int axis, double alter)
[14:31:20] <alex_joni> {
[14:31:20] <alex_joni> /*! \todo FIXME - the comp stuff is temporarily disabled, so "alter" must
[14:31:20] <alex_joni> be disabled too. BTW, what the heck is "alter" anyway?
[14:31:20] <alex_joni> */
[14:31:26] <alex_joni> that's in usrmotintf.cc
[14:31:28] <SWPadnos> heh
[14:31:40] <alex_joni> bet jmk wrote that before he found out what it is
[14:31:56] <SWPadnos> it would be cool to have lxr available for the emc repository
[14:32:03] <alex_joni> but I still don't quite know.. it's supposed to be an offset which gets added to the motor pos
[14:32:13] <alex_joni> so you can dynamically change it while it runs
[14:33:37] <alex_joni> SWPadnos: here's the most usefull I've found about alter
[14:33:38] <alex_joni> http://cvs.linuxcnc.org/cgi-bin/cvsweb.cgi/emc/src/emctask/alter.c
[14:33:51] <alex_joni> sounds like a poor man's HAL
[14:34:13] <SWPadnos> well, that's noly 5 years, 11 months old ;)
[14:34:15] <SWPadnos> only
[14:37:20] <skunkworks> alex_joni: didn't someone just do that with emc2?
[14:37:47] <skunkworks> temp comp
[14:37:54] <alex_joni> here's a usefull diff:
http://cvs.linuxcnc.org/cgi-bin/cvsweb.cgi/emc/src/emctask/alter.c.diff?r1=1.2;r2=1.3
[14:38:02] <alex_joni> skunkworks: no, I only said it used to be in emc1
[14:38:03] <alex_joni> :)
[14:39:13] <skunkworks> hmm - I thought a few weeks ago.. they guy using kins to map the lead screw error also. Or am I confused.
[14:39:47] <alex_joni> skunkworks: different thing
[14:39:47] <SWPadnos> I don't think alter is part of leadscrew compensation, except that the comp struct seemed to be a good place to put the "external offset"
[14:40:02] <alex_joni> SWPadnos: yeah, but in emc2 there's a motor offset anyways
[14:40:12] <SWPadnos> right, so alter is probably redundant in emc2
[14:40:18] <alex_joni> so alter might/should go away/different place
[14:40:25] <alex_joni> that's why I wanted to talk about this..
[14:40:30] <SWPadnos> yep
[14:40:43] <alex_joni> maybe jmk will be around later.. he did most of this stuff anyways (emc2)
[14:40:43] <SWPadnos> note that the compensation array is fixed at 256 elements as well
[14:40:48] <SWPadnos> yep
[14:40:58] <alex_joni> SWPadnos: noted.. but at least it reports an error :)
[14:41:05] <alex_joni> in emc1 it just silenced away I think
[14:41:10] <SWPadnos> maybe I'll set up a Linux machine so I can join the discussion a bit more intelligently
[14:41:34] <skunkworks> doesn't help me any. :)
[14:41:44] <alex_joni> skunkworks: :P
[14:41:50] <SWPadnos> it may be possible to have the program that fills the array do some interpolating to cut down the number of coefficients down
[14:42:22] <alex_joni> SWPadnos: why would you want that?
[14:42:27] <Lerneaen_Hydra> alex_joni: WRT the discussion on the dev list yesterday and the strange stepover in axis, is that resolved yet?
[14:42:42] <alex_joni> Lerneaen_Hydra: don't think so
[14:43:13] <Lerneaen_Hydra> was that running sim or real iron?
[14:43:23] <SWPadnos> alex_joni, so you could still run with a small-ish array. not the best solution, but possibly better than just turning off compensation if a larger set of points is provided
[14:43:44] <alex_joni> SWPadnos: if the user needs a larger array, it's one #define away
[14:44:10] <SWPadnos> that's one recompile away though, so it's too complex for many users ;)
[14:44:22] <alex_joni> sudo apt-get build-dep emc2
[14:44:27] <SWPadnos> too complex
[14:44:28] <alex_joni> apt-get source emc2
[14:44:29] <alex_joni> :)
[14:44:31] <SWPadnos> ;)
[14:44:34] <anonimasu> 7;)
[14:44:45] <alex_joni> then they should find someone to do it for them :P
[14:44:47] <anonimasu> im going to come whine here about stuff like that :D
[14:45:04] <alex_joni> anonimasu: you I have no hard feelings to slap around
[14:45:31] <anonimasu> lol
[14:45:41] <anonimasu> im looking forward to moving the mill with the usc :)
[14:49:15] <alex_joni> hi ray
[14:49:20] <alex_joni> back home?
[14:49:44] <rayh> Yes for a few hours.
[14:50:22] <alex_joni> hours doesn't sound right :)
[14:51:29] <rayh> don't I know.
[14:59:00] <skunkworks> rayh: keeping busy
http://www.electronicsam.com/images/KandT/servostart/DSC_2105.JPG
[14:59:13] <skunkworks> suprisingly not distructive testing yet.
[15:01:32] <rayh> * rayh looking
[15:11:09] <rayh> Okay skunkworks. What you doing with that.
[15:12:01] <bill20r3> that's quite a heatsink.
[15:20:09] <skunkworks> rayh: just testing some mosfets I got. jmk was right - they are 44a but I will be lucky to run them at 20a contiuous
[15:21:13] <rayh> That whole heat sink would glow.
[15:44:11] <skunkworks> without a fan - it boils water (spit) at 20a
[15:58:40] <anonimasu> how about circulating water through the heatsink?
[16:03:08] <skunkworks> anonimasu: maybe. still goofing around
[16:05:37] <SWPadnos> holy crap. dreamhost just increased the storage and bandwidth limits a whole bunch
[16:06:06] <SWPadnos> like 400G storage, 4TB transfer / month
[16:06:30] <bill20r3> nice.
[16:06:39] <bill20r3> for how much $$$?
[16:06:48] <SWPadnos> $15.95/month
[16:06:58] <SWPadnos> (if you prepay, $19.95 if you don't)
[16:07:18] <bill20r3> woah
[16:07:27] <bill20r3> I may need that someday
[16:07:40] <SWPadnos> plus, they add 2GB/week of storage, and 32GB/mo transfer every week
[16:07:59] <SWPadnos> I don't think I can generate enough data or use enough bandwidth to catch up with the increases
[16:08:06] <bill20r3> * bill20r3 can
[16:08:06] <bill20r3> heh
[16:08:37] <SWPadnos> well, if I start taking zillions of photos/videos, then yeah ;)
[16:13:59] <bill20r3> Server uptime: 2 days 22 hours 22 minutes 6 seconds
[16:13:59] <bill20r3> Total accesses: 1339903 - Total Traffic: 38.7 GB
[16:14:21] <bill20r3> although 4TB is a ton of traffic in any case.
[16:15:04] <SWPadnos> yeah, and with the increases I've got, I'm up to 422 GB storage, and 4.75 TB transfer
[16:16:28] <SWPadnos> hmmm - that's roughly the equivalent of a 15 MBit/sec internet connection, at 100% usage
[16:16:35] <SWPadnos> 24/7
[16:17:26] <SWPadnos> so if I had FIOS (and they allowed servers), I could almost serve more data than this plan ;)
[16:30:40] <bill20r3> fios?
[16:31:29] <ValarQ> fancy input/output system
[16:31:39] <ValarQ> :o)
[16:32:56] <anonimasu> skunkworks: if you really need that kind of power out of one
[16:33:36] <bill20r3> ha
[16:33:44] <SWPadnos> Fiber something something Service
[16:34:14] <SWPadnos> it's Verizon's high speed ISP service, but even the most expensive plan is only 30 MBits down/5 MBits up
[16:34:27] <SWPadnos> and that's $180/month
[16:39:15] <anonimasu> :)
[16:39:52] <anonimasu> *yawns
[16:39:53] <anonimasu> *
[16:41:32] <Lerneaen_Hydra> SWPadnos: you kidding, right?
[16:41:48] <SWPadnos> about what?
[16:42:11] <Lerneaen_Hydra> the fastest fios is 30/5
[16:42:19] <SWPadnos> nope - not kidding
[16:42:32] <Lerneaen_Hydra> oh my
[16:44:10] <SWPadnos> almost as fast as what you can get for $20 or so in Korea and Japan
[16:44:16] <SWPadnos> well, actually it's not :(
[16:46:06] <anonimasu> :/
[16:54:24] <skunkworks> anonimasu: I would like to. We have some servos that are 220v 17a continuous and 87a peak
[16:54:46] <skunkworks> not saying I can get something to work with them
[16:55:13] <anonimasu> skunkworks: perhaps you need bigger MOSFET's
[16:55:24] <anonimasu> or whatever they use in apps like that
[16:55:46] <skunkworks> perhaps. but I am just playing to see what I can do. the price was decent on these
[16:55:52] <anonimasu> yeah :)
[16:56:28] <anonimasu> hm, I should go outside and start working on the spindle
[16:56:34] <anonimasu> going to mount the motors there now
[16:56:40] <anonimasu> motors/motor
[16:56:43] <anonimasu> that is
[16:56:52] <skunkworks> good luck
[16:57:07] <anonimasu> thanks
[16:57:15] <anonimasu> I need it, I need to modify my spindle a bit
[16:58:04] <anonimasu> going to add some thread and make provisions for a toolchanger :)
[16:58:23] <skunkworks> tool changers are nice :)
[16:58:31] <anonimasu> yeah
[16:58:46] <anonimasu> it's too bad I cant get a retainer in there easily
[16:58:54] <anonimasu> I'll have to use the drawbar
[16:59:03] <anonimasu> but it's ok..
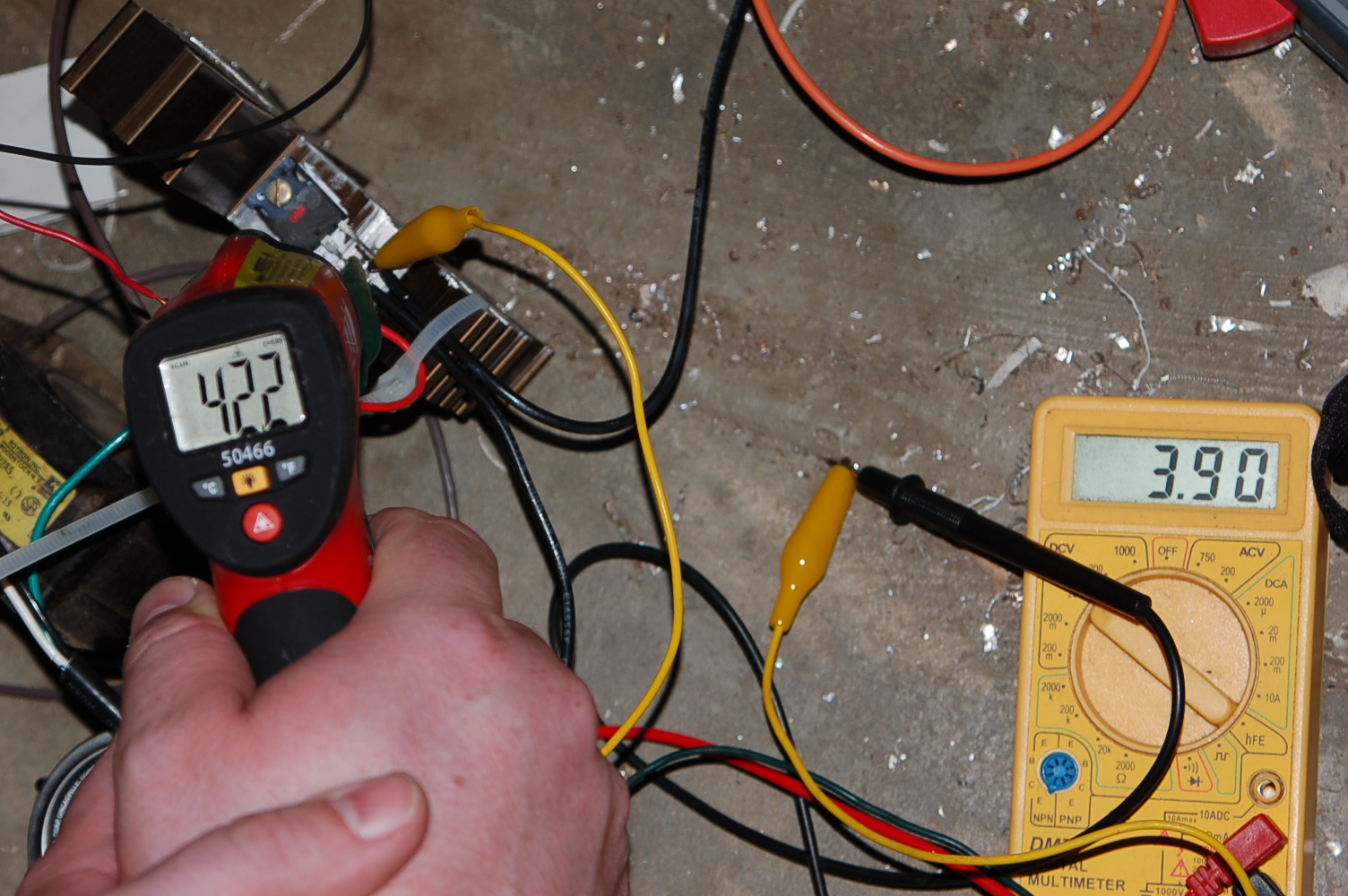
[17:00:20] <skunkworks> anonimasu: 20 amps
http://www.electronicsam.com/images/KandT/servostart/DSC_2110.JPG
[17:00:30] <anonimasu> ^_^
[17:00:37] <anonimasu> is that 42.2
[17:00:40] <anonimasu> or 422
[17:00:48] <skunkworks> 42.2c
[17:00:54] <anonimasu> ok :)
[17:00:57] <anonimasu> not hot at all
[17:01:01] <anonimasu> is that at 220v
[17:01:03] <anonimasu> ?
[17:01:08] <skunkworks> no - I could live with that. -
[17:01:25] <anonimasu> with a big heatsink that shouldnt be a problem at all
[17:01:25] <skunkworks> nope just what it took to put 20amps thru it.
[17:01:38] <skunkworks> pretty much juction voltage :)
[17:01:40] <anonimasu> yeah but at what voltage?
[17:01:43] <anonimasu> hm ok
[17:01:53] <anonimasu> I'd like to see that at 220v
[17:01:54] <anonimasu> :D
[17:02:20] <anonimasu> 4,4kw ^_^
[17:02:27] <skunkworks> that is the plan :) should really not make a diffence if I am thinking right. 20 amps is 20 amp.
[17:02:42] <anonimasu> voltage*amps=watt
[17:02:55] <skunkworks> the power the disapated is still going to be the juction voltage
[17:03:15] <anonimasu> hm, that's kind of odd
[17:03:28] <anonimasu> but im not a wiz at electrics/electronics
[17:04:05] <skunkworks> 20a at 220 is still going to be 2.4v on juction voltage if that made sense
[17:04:16] <anonimasu> ah yeah
[17:04:37] <skunkworks> just a bit scaryer if something goes wrong :)
[17:04:48] <anonimasu> hehe
[17:04:52] <anonimasu> boom :p
[18:09:20] <skunkworks> ok. I might be getting the hang of eagle.
[18:41:32] <robin_sz> meep?
[18:54:25] <A-L-P-H-A> what's a graphical FTP program for gnome?
[18:54:42] <fenn> nautilus?
[18:54:51] <A-L-P-H-A> does that upload?
[18:54:55] <bill20r3> gftp?
[18:54:56] <A-L-P-H-A> need sftp as well.
[18:55:04] <fenn> wanker
[18:55:10] <fenn> just open a console and type "sftp"
[18:55:29] <alex_joni> xterm is graphical enough
[18:55:39] <fenn> yeah, it runs on X
[18:55:48] <fenn> you can pick what font and color
[18:56:32] <alex_joni> and transparency on modern ones :)
[19:09:27] <fenn> fake transparency
[19:17:43] <ValarQ> * ValarQ prefers rxvt-unicode
[19:18:01] <ValarQ> one of the few that supports true transparency btw
[19:32:52] <alex_joni> good night all
[19:34:13] <skunkworks> night alex
[19:34:36] <SWPadnos> seeyalateralex
[19:35:30] <anonimasu> fwell
[19:35:33] <anonimasu> fireftp
[19:57:25] <Lerneaen_Hydra> bye
[19:59:33] <A-L-P-H-A> in a shell, how can I move an entire folder? say I have /home/ABC/asdf, but I want all of asdf to be in /home/asdf (removing the ABC)
[19:59:38] <A-L-P-H-A> mv only moves files...
[19:59:48] <SWPadnos> no, it moves dirs as well
[20:00:05] <A-L-P-H-A> also, I have a folder called /home/asdf
[20:00:18] <A-L-P-H-A> so should I kill /home/asdf first before moving the other one?
[20:00:24] <SWPadnos> so you want to move files into an existing dir, or you want to move the dir to a new spot?
[20:00:33] <SWPadnos> it doesn't matter
[20:00:33] <fenn> mv -r
[20:01:04] <A-L-P-H-A> -r is illegal
[20:01:06] <fenn> if you move one directory to another directory it will put it in the directory (not overwrite the old one)
[20:01:45] <SWPadnos> mv /home/ABC/asdf/* /home/asdf/
[20:02:17] <A-L-P-H-A> SWPadnos: that just moved the files, not he dirs.
[20:02:23] <A-L-P-H-A> oh
[20:02:26] <A-L-P-H-A> doing it manually
[20:02:31] <fenn> you did type * not *.* right?
[20:02:32] <A-L-P-H-A> there's lots of sub folders.
[20:03:11] <A-L-P-H-A> okay... move things, just empty folders.
[20:03:13] <cradek> mv /home/ABC/asdf /home
[20:03:28] <SWPadnos> yeah - that too ;)
[20:03:29] <Lerneaen_Hydra> hi cradek
[20:03:33] <cradek> * cradek hands the #emc channel a linux newbie book
[20:03:44] <SWPadnos> will that work if /home/asdf already exists?
[20:03:47] <A-L-P-H-A> err.
[20:03:56] <Lerneaen_Hydra> cradek: anything new with the sherline?
[20:03:59] <A-L-P-H-A> no.... okay... I'm missing a few words in my last statement
[20:04:10] <A-L-P-H-A> it moved stuff, just not folders that already existed.
[20:04:12] <cradek> Lerneaen_Hydra: nope, I haven't messed with it much
[20:04:21] <A-L-P-H-A> so I'll just rename the old folders
[20:04:23] <Lerneaen_Hydra> cradek: oh, ok
[20:05:29] <cradek> SWPadnos: depends whether the existing asdf is a dir or file
[20:05:46] <SWPadnos> ok
[20:05:48] <cradek> well also depends what you mean by "work", heh
[20:06:00] <SWPadnos> heh - "do the expected and hoped for thing" ;)
[20:06:39] <cradek> it does the sane thing - if it exists and is a dir, it puts it in the dir; if it exists and is a file, it gives an error
[20:06:58] <cradek> mv: cannot overwrite non-directory `b' with directory `a'
[20:07:25] <SWPadnos> how sane
[20:08:20] <anonimasu> I think there's -f
[20:08:20] <anonimasu> ;)
[20:09:00] <K`zan> K`zan is now known as wv9k
[20:09:49] <wv9k> wv9k is now known as K`zan
[20:21:49] <SWPadnos> on a completely separate note, this cooler works *very* well:
http://www.newegg.com/Product/Product.asp?Item=N82E16835128009
[20:23:15] <SWPadnos> I did lap the bottom surface, so mine is probably doing a bit better than normal, but it's keeping the CPU 6 C cooler than the AMD stock heatsink/fan at idle
[20:24:07] <SWPadnos> cooling from a high temperature (stupid motherboard - don't ask), it was closer to 15 C lower, and was 2C cooler with the fan not running
[20:24:29] <cradek> blue balls?
[20:24:35] <SWPadnos> heh
[20:24:51] <SWPadnos> I'd prefer if the lights weren't there, but the case will be closed anyway ;)
[20:26:53] <cradek> I don't think I could have made a better choice. This thing is amazing!! Looks super rad too in the dark. </reviewer>
[20:27:22] <cradek> Pros: Can anyone help me walk through installation
[20:27:23] <cradek> Cons: I tried googling for directions, got nothing
[20:27:24] <SWPadnos> this reviewer has little to no experience withthis type of product" ;)
[20:27:28] <SWPadnos> heh
[20:27:32] <cradek> man these are great reviews
[20:27:55] <SWPadnos> I generally glance at the reviews, then pretty much ignore what they say
[20:31:26] <Lerneaen_Hydra> bah, a real geek machines his own cooling (prefferably water-based) ;)
[20:32:13] <SWPadnos> I generally use the AMD retail coolers (I like the 3-year warranty on the CPUs), but I'm trying to quiet things down a bit
[20:32:22] <SWPadnos> water would help that, of course
[20:33:06] <Lerneaen_Hydra> undervolting/underclocking really helps a lot too
[20:33:36] <SWPadnos> well, I prefer to have it cool while actually doing large smounts of useful work, so the underclock thing isn't really helpful for me
[20:33:37] <Lerneaen_Hydra> as heat scales linearly with clockspeed and squared with voltage
[20:33:43] <SWPadnos> amounts, not smounts
[20:39:57] <fenn> water is for wenies
[20:40:09] <fenn> a real geek uses hydrazine
[20:40:38] <SWPadnos> real geeks use a mineral oil bath cooled by liquid nitrogen
[20:40:46] <anonimasu> hehe
[20:40:51] <fenn> * fenn wonders how he managed to remember the specific heat of hydrazine
[20:41:01] <bill20r3> real geeks buy a fast enough machine in the first place...
[20:41:04] <anonimasu> SWPadnos: -80 degrees on a bad day
[20:41:09] <SWPadnos> hwh
[20:41:13] <SWPadnos> heh
[20:41:15] <anonimasu> I
[20:41:18] <SWPadnos> U
[20:41:32] <anonimasu> I've actually seen a overclocked machine cooled with liquid nitrogen
[20:41:39] <anonimasu> and dry ice
[20:42:11] <anonimasu> and 2 cascade coolers..
[20:42:21] <SWPadnos> yep - I've seen it on the web, but not in real life
[20:42:26] <anonimasu> it was cool
[20:42:30] <SWPadnos> very cool
[20:42:32] <fenn> what was it, an atomic clock?
[20:42:35] <anonimasu> we expected the cascade coolers do blow :)
[20:42:40] <anonimasu> nah, just a p4 they overclocked..
[20:43:02] <SWPadnos> I've seen photos of a machine submerged in mineral oil, and cooled by liquid nitrogen or dry ice
[20:43:29] <anonimasu> there was a ball of frost around the cpu..
[20:43:44] <anonimasu> :D
[20:44:27] <anonimasu> the guys had -100c at the processor ;)
[20:44:31] <anonimasu> http://www.nordichardware.com/Articles/?skrivelse=482
[20:46:07] <anonimasu> ^_^
[20:47:14] <fenn> then they weren't pushing it hard enough1
[20:47:57] <anonimasu> hehe
[20:48:13] <anonimasu> they poured liquid nitrogen down at it..
[20:48:14] <anonimasu> :D
[20:51:06] <fenn> oo lithium hydride has an even higher specific heat capacity
[20:51:29] <SWPadnos> specific heat is probably less important than thermal conductivity
[20:51:45] <Lerneaen_Hydra> fenn: lithium hydride?! sounds rather non-inert ;)
[20:51:53] <fenn> it's a rocket fuel :)
[20:52:10] <Lerneaen_Hydra> oh, that's where I heard it from
[20:52:10] <anonimasu> * anonimasu pours oxidizer at it
[20:52:16] <Lerneaen_Hydra> boom!
[20:52:24] <Lerneaen_Hydra> or more like fwoom
[20:58:23] <skunkworks> hmm - then my servo amp would be 44a....
[20:59:34] <skunkworks> We have a laser that the output tubes are submersed in oil. the oil is pumped and cooled thru a radiator.
[21:01:50] <bill20r3> neat.
[21:01:53] <bill20r3> a cutting laser?
[21:02:00] <skunkworks> 1000w co2
[21:02:03] <skunkworks> yes
[21:02:26] <skunkworks> at work - not home ;)
[21:02:51] <skunkworks> yet
[21:03:48] <anonimasu> hm
[21:05:17] <bill20r3> it'd be handy to keep away solicitors.
[21:05:20] <Lerneaen_Hydra> bah, 'night folks
[21:05:39] <bill20r3> nite.
[21:11:49] <skunkworks> bill20r3: how is the mill coming?
[21:14:32] <bill20r3> slowly, but it's still coming.
[21:14:48] <bill20r3> I keep getting frustrated with my inability to get precise measurements.
[21:14:56] <bill20r3> it's probablly 1/2 me and 1/2 cheap chinese tools.
[21:15:09] <Bo^Dick> hi guys
[21:15:22] <Bo^Dick> does anyone know the bandwidth of the geckodrive?
[21:17:11] <Bo^Dick> ah, found it
[21:17:14] <Bo^Dick> 200kHz
[21:18:46] <jepler> you mean the maximum step rate? That's what I compute from the datasheet, .5uS "0" time + 4.5uS "1" time = 5uS, 200kHz
[21:20:13] <Bo^Dick> does that yield a maximum rpm of only 100 when using a 200 step/rev motor?
[21:20:30] <Bo^Dick> wait, rps
[21:20:32] <Bo^Dick> that is
[21:20:51] <Bo^Dick> 6000 rpm
[21:21:11] <SWPadnos> yes, 2000 microsteps/rev = 100 RPS = 6000 RPM
[21:21:36] <Bo^Dick> that's pretty fast
[21:21:36] <SWPadnos> however, there isn't a stepper motor in existence that will be able to do any work at that speed
[21:21:54] <jepler> and you won't attain that rate with PC software step generation either
[21:21:58] <jepler> bbl
[21:22:25] <Bo^Dick> in fact, i've seen my computer output 200kHz at the parport output but that was only two lines of code
[21:22:52] <Bo^Dick> no CNC software could possibly work that quick and efficient
[21:22:58] <anonimasu> well,
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Universal_Stepper_Controller
[21:23:02] <SWPadnos> you son't have a good pulsetrain at that rate, especially when doing anything else (like motion planning, for instance)
[21:23:11] <anonimasu> actually there it is
[21:23:13] <anonimasu> http://jelinux.pico-systems.com/univstep.html
[21:23:31] <SWPadnos> of course - I'm talking about software generated steps
[21:23:47] <A-L-P-H-A> silly commercial made me laugh... this yogo (yogurt drink tube thing), bunch of random people in pink outfits are popping in and out of holes. Then dracula comes in... one of the pink guys goes to him 'seriously you can't be here' "why" 'cause you make people nervous' "fine..." dracular walks off... heh
[21:24:49] <anonimasu> software pulserates are crap in general
[21:24:52] <anonimasu> :/
[21:24:59] <SWPadnos> yes
[21:25:18] <SWPadnos> hence devices like the USC and G-Rex
[21:25:21] <anonimasu> to get the resolution I wanted I had to really push it..
[21:25:35] <Bo^Dick> pico-systems huh
[21:25:44] <Bo^Dick> are they better than geckos?
[21:26:02] <anonimasu> that's just a pulse generator for emc
[21:26:09] <A-L-P-H-A> SWPadnos: wheren't you making one at one time?
[21:26:11] <A-L-P-H-A> a pulse gen...
[21:26:35] <anonimasu> ah well, really it's a i/o board.. you can run steppers with encoders with a usc + the daughterboard
[21:26:37] <SWPadnos> I have a "manual pulse generator", that makes a stepper motor/driver act like a power feed
[21:26:50] <SWPadnos> I was going to make a step generator, but the project went away
[21:27:24] <A-L-P-H-A> away where?
[21:27:27] <A-L-P-H-A> poof?
[21:27:31] <Bo^Dick> it looked like more than jsut a pulse gen
[21:27:31] <A-L-P-H-A> or just backburner?
[21:27:39] <SWPadnos> poof / backburner
[21:28:00] <anonimasu> Bo^Dick: well i thas some relays for i/o too
[21:28:12] <Bo^Dick> stepper driver==stepper controller?
[21:28:23] <anonimasu> no
[21:28:27] <Bo^Dick> ok
[21:28:31] <anonimasu> the controller dosent do anything drive-ish
[21:28:38] <anonimasu> it just outputs smooth pulsetrains
[21:28:54] <Bo^Dick> to me i thought stepper driver=(stepper controller+drive stage)
[21:28:57] <A-L-P-H-A> oh wow.. $250
[21:29:12] <Bo^Dick> 250$ for what?
[21:29:12] <SWPadnos> you can have a single thing that does both, like the pic-servo chip (I think)
[21:29:13] <A-L-P-H-A> http://jelinux.pico-systems.com/pricelist.html
[21:29:26] <SWPadnos> oops - nevermind me
[21:29:39] <SWPadnos> it's a pretty good deal for what it does
[21:29:59] <Bo^Dick> you're not possibly saying the pulsegen was 250$
[21:30:06] <SWPadnos> yes, it is
[21:30:21] <Bo^Dick> :D
[21:30:43] <SWPadnos> 4 axis, 100-ns resolution, 4 encoder inputs, 16 digital inputs and 8 outputs, all on one parallel port - not a bad thing actually
[21:30:56] <SWPadnos> some people charge $100 for a good breakout board
[21:31:42] <Bo^Dick> yeez
[21:32:34] <Bo^Dick> this isn't the first time i've encountered external timing-hardware for CNC purposes
[21:33:00] <anonimasu> www.flashcutcnc.com
[21:33:00] <Bo^Dick> but hey 250$
[21:33:20] <anonimasu> *grin*
[21:33:40] <Bo^Dick> the reason for this is poor timing accuracy through an operating system
[21:33:46] <anonimasu> CS-4A00-0 Software and Signal Generator (Board Only) $1045
[21:34:06] <Bo^Dick> what a bargain then
[21:34:11] <anonimasu> lol
[21:34:14] <anonimasu> Bo^Dick: build one
[21:34:35] <Bo^Dick> well, i'm slowly getting into the world of microcontrollers
[21:34:41] <SWPadnos> yeah - it's sad that a $2 microcontroller can have a pulsetrain that's about 100x as consistent as a 2GHz+ PC
[21:55:55] <A-L-P-H-A> OMG
[21:56:07] <A-L-P-H-A> the flashcut signal gen is $1.1K!?!?!
[21:56:20] <A-L-P-H-A> that is a freak'n PROFIT!
[21:56:46] <rayh> Well it does come with the software to talk with it.
[21:56:56] <A-L-P-H-A> SWPadnos what would it take to commission you to write an Atmel signal generator?
[21:57:13] <SWPadnos> $100000 + a week in Hawai'i
[21:57:44] <bill20r3> and a pony.
[21:57:54] <SWPadnos> OMG PONIES!!!
[21:57:55] <A-L-P-H-A> how about $1000 + weekend in Toronto + a meal at Rodney's Oyster bar?
[21:58:05] <SWPadnos> err - nope, that's not enough ;)
[21:58:24] <A-L-P-H-A> how about $1000 + long weekend in Toronto + a meal at Rodney's Oyster bar?
[21:58:24] <bill20r3> what kind of signal, just something to use as a clock reference?
[21:58:53] <SWPadnos> it depends on the specs. I can make an AVR-based step generator woth a serial interface without too much trouble, but making it into a product takes time
[21:58:58] <bill20r3> I've been playing with avr's lately, they're pretty cool.
[21:59:08] <A-L-P-H-A> avrs are great
[21:59:16] <A-L-P-H-A> SWPadnos: I don't even know what's up with that.
[21:59:25] <SWPadnos> yep - very nice chips. I've been using them since they were first released
[21:59:28] <A-L-P-H-A> maybe I should hack g-rex, and convert it to an atmel..
[21:59:38] <A-L-P-H-A> I don't know why they went with a rabbit
[21:59:47] <SWPadnos> I've considered making an ARM or AVR32 CPU for the G-Rex
[21:59:54] <SWPadnos> it was easy - the ydidn't have to develop it
[22:00:12] <A-L-P-H-A> but like develop what?
[22:00:29] <A-L-P-H-A> all they have right now is... is making a pulse train, and turn have some IO ports.
[22:00:41] <A-L-P-H-A> relay it all back to via USB or Ethernet.
[22:00:43] <SWPadnos> they didn't have to design a CPU board with ethernet and memory and stuff
[22:01:13] <SWPadnos> actually, the software in the rabbit wil do coordinated motion, with acceleration and velocity limiting
[22:01:21] <A-L-P-H-A> gcode in -> buffer stack -> pulse train out.
[22:01:35] <A-L-P-H-A> it's opensourced.
[22:01:56] <A-L-P-H-A> so... we could hack the shit outta it... and port it to AVR.
[22:02:03] <A-L-P-H-A> making that sucked CHEAP.
[22:02:07] <A-L-P-H-A> the rabbits are expensive mofos.
[22:02:16] <A-L-P-H-A> $100/chip + $150 programmer or something
[22:02:19] <SWPadnos> not really that expensive for what they have, actually
[22:02:22] <SWPadnos> nope
[22:02:25] <A-L-P-H-A> ?
[22:02:32] <SWPadnos> $60 or so for the module, I think
[22:02:33] <A-L-P-H-A> wait... I'm dead wrong.
[22:02:44] <SWPadnos> the main issue with it is that you have to use their C compiler, which only runs on Windows
[22:02:48] <A-L-P-H-A> I'm angry atm... I don't know why.
[22:02:53] <A-L-P-H-A> I need some tea to calm me down.
[22:03:05] <A-L-P-H-A> brb
[22:03:07] <SWPadnos> heh
[22:15:06] <A-L-P-H-A> hmm...
[22:15:18] <A-L-P-H-A> trying to figure out the speeds isn't as easy as I would have expected.
[22:15:26] <A-L-P-H-A> pulse gen speeds that is.
[22:15:50] <A-L-P-H-A> acceleration, constant velocity, deceleration. Transitional movements.
[22:16:27] <A-L-P-H-A> continuous velocity as well
[22:26:10] <SWPadnos> it can be a bit of a pain, but it's not too bad
[22:26:27] <SWPadnos> the real issue becomes quantization error, since you'd probably use integer math in a microcontroller
[22:27:15] <A-L-P-H-A> SWPadnos: you taught me a trick...
[22:27:24] <A-L-P-H-A> multiply it by whatever decimal place I want...
[22:27:24] <SWPadnos> I'm sure ;)
[22:27:38] <A-L-P-H-A> but yeah.
[22:27:42] <SWPadnos> sure, and you can use difference equations for vel and accel as well
[22:27:54] <A-L-P-H-A> I think AVR C can handle some of the math for us, couldn't we?
[22:27:58] <SWPadnos> in fact, you can do constant contouring that way (or close to it) also
[22:28:03] <A-L-P-H-A> toss some ram if we need it
[22:28:17] <A-L-P-H-A> SWPadnos: any motivation for you to do so?
[22:28:20] <SWPadnos> the AVR isn't all that fast for that kind of thing, so it depends on the algorithm
[22:28:57] <SWPadnos> well, I'd love to make either an open-source compatible G-Rex CPU, or a completely differnet EMC-compatible ethernet-connected unit
[22:29:08] <SWPadnos> the latter being my preference
[22:29:20] <SWPadnos> but it's a big job, and I still have to pay the bills and stuff
[22:29:28] <A-L-P-H-A> I say EMC compatible devices.
[22:29:53] <SWPadnos> I agree. the G-Rex FPGA isn't really geared toward feedback control over ethernet/USB (which makes some sense)
[22:30:01] <A-L-P-H-A> make it better than the g-rex, and sell it for the same price!
[22:30:09] <SWPadnos> so even an ARM/AVR32 CPU wouldn't really make it great for EMC
[22:30:18] <A-L-P-H-A> :(
[22:30:45] <SWPadnos> right - that's the idea, and Eric Johnson recently did some RTNet/HAL work that I need to look at as well
[22:48:51] <skunkworks> woo hoo. finally made my first part in eagle. (actully not... just put a package to a symbol. but hey)
[22:49:23] <jepler> skunkworks: now you get to make the board and find out if you were right
[22:49:37] <skunkworks> working on it :)
[22:49:37] <jepler> I made a USB connector symbol and package, and got the pins the wrong way 'round
[22:49:46] <bill20r3> BSU
[22:49:52] <jepler> bill20r3: yeah basically
[22:49:52] <A-L-P-H-A> skunkworks: yeah... it's sometimes a pain. :) but I've done it for several parts I ordered from digikey.ca
[22:50:01] <skunkworks> This is a large diode - so I have a 50/50 chance that it is right :)
[22:50:39] <A-L-P-H-A> I walked into the shop... and just looked... i didn't even touch a tool.. just turned on the light... :(
[22:50:42] <A-L-P-H-A> too much to clean.
[22:58:24] <CIA-8> 03jepler 07HEAD * 10emc2/configs/common/emc.nml:
[22:58:24] <CIA-8> with this change, emc2 --enable-simulator seems to run in 64-bit mode
[22:58:24] <CIA-8> $ file bin/emcsvr
[22:58:24] <CIA-8> bin/emcsvr: ELF 64-bit LSB executable, AMD x86-64, version 1 (SYSV), for GNU/Linux 2.4.0
[23:02:35] <A-L-P-H-A> how does one read what amp rating a wire is good for?
[23:03:51] <jepler> first hit for "wire gauge current", maybe it helps?
http://www.powerstream.com/Wire_Size.htm
[23:04:20] <A-L-P-H-A> CSA CMG 50C 22 AWG LL83251 (UL) CM E129988 .... CSA AWM II A/B 05C 600V FT4 LL67097 WO# 102459
[23:04:25] <A-L-P-H-A> checking
[23:05:10] <A-L-P-H-A> What's chassis wiring?
[23:05:16] <jepler> not sure
[23:05:27] <jepler> not knowing what it means, I'd use the lower (power transmission) figure for anything
[23:06:29] <jepler> but that may be for short lengths (within a chassis) not long lengths (power transmission)
[23:06:46] <jepler> bbl
[23:06:49] <A-L-P-H-A> yeah, I just gathered that after looking it up in google
[23:06:51] <A-L-P-H-A> thanks jepler
{kind=link}
{kind=link}
{kind=link}