Back
[00:18:11] <anonimasu> what's that?
[00:18:11] <anonimasu> :D
[00:18:59] <anonimasu> pew pew
[00:19:19] <anonimasu> http://www.gmptools.com/nf/70329.htm
[00:19:26] <toast> capstan drives are apparently what a lot of v. accurate measuring machines and machine tools use
[00:19:32] <toast> it's a long rod that's driven by a roller
[00:19:38] <toast> instead of a screw
[00:19:45] <fenn> like a V pulley?
[00:19:45] <anonimasu> hm ok
[00:19:47] <toast> nah
[00:19:53] <toast> it's like, just a rod
[00:19:55] <toast> or a square
[00:19:59] <fenn> i mean the roller
[00:20:03] <toast> it's usually flat
[00:20:36] <toast> it's in the shape of the bar, so if it's a square, it's a flat bar
[00:20:40] <toast> and if it's a round bar, it's a half moon
[00:20:46] <toast> semicircle thing
[00:20:58] <fenn> this is really cool, apparently having something to do with capstan drives, but i cant figure out what part is the capstan:
http://plumpe.home.mindspring.com/plotter.html
[00:21:32] <toast> oh, he's talking about a drive from a casette player
[00:21:34] <toast> which are also called capstan drives
[00:21:41] <toast> i think
[00:21:52] <fenn> yep according to google
[00:22:25] <toast> but apparently, aside from piezoelectric acutators, capstan drives are the most accurate way to do linear positioning
[00:22:48] <fenn> http://plumpe.home.mindspring.com/lathe.html
[00:23:04] <anonimasu> http://pcsl.mit.edu/2.000/robotworld/actuator%20technology.html
[00:23:24] <toast> yeah
[00:23:28] <toast> fenn: ?
[00:23:30] <anonimasu> um, it's a bar that rides on two preloaded rollers.
[00:23:31] <anonimasu> big deal.
[00:23:48] <toast> you could say that about anything though
[00:24:00] <toast> ballscrews, they're a screw with ball bearings
[00:24:00] <toast> big deal
[00:24:11] <toast> atomic bombs, big deal
[00:24:15] <toast> etc
[00:24:19] <anonimasu> toast:
[00:24:20] <anonimasu> A fine surface finish on the contacting faces is necessary to minimise wear and improve repeatability. Inaccuracies in the circularity of the rollers and spacing of the working faces of the drive rod will cause variations in the prefrgload, thus affecting the transmission ratio.
[00:24:36] <toast> right?
[00:24:54] <anonimasu> it's a friction based drive..
[00:24:55] <toast> that's obvious
[00:24:58] <fenn> toast:
http://www.zero-max.com/products/rohlix/rohlixmain.asp
[00:25:01] <anonimasu> with 2 ground surfaces..
[00:25:14] <toast> right?
[00:25:32] <toast> what are we even arguing about?
[00:25:44] <anonimasu> nothing really
[00:25:44] <fenn> who's arguing?
[00:25:51] <anonimasu> im not too amazed at the technology
[00:25:58] <toast> the implementation is the impressive part
[00:26:10] <anonimasu> fenn: thoose ones are cool :)
[00:26:13] <fenn> you havent said anything about "the implementation" though
[00:26:24] <anonimasu> fenn: you were faster then me
[00:26:34] <toast> uh, they're used on the most accurate machine in the world
[00:26:46] <toast> machines, i should say
[00:26:47] <fenn> and what's that
[00:26:54] <toast> the lodtm at lawernce livermore
[00:27:08] <toast> they're also used on scanning microscopes and other measurement stuff
[00:28:26] <toast> all the non-friction portions of the drives are on aerostatic bearings
[00:28:33] <toast> and have kinematic mounts
[00:28:51] <anonimasu> how do you move the shaft?
[00:28:59] <toast> servo
[00:29:16] <anonimasu> http://www.patentstorm.us/patents/5700233-description.html
[00:29:53] <anonimasu> HM
[00:30:11] <toast> ?
[00:30:17] <anonimasu> toast: didnt we talk about servo jitter before?
[00:30:42] <toast> i thought we talked about stepper jitter
[00:31:03] <fenn> the lodtm is way smaller than i thought it would be
[00:31:09] <toast> 1.5m?
[00:31:18] <toast> work platen?
[00:31:20] <toast> or like, overall
[00:31:27] <fenn> overall
[00:31:30] <fenn> http://www-eng.llnl.gov/lodtm/images/machine_lg.jpg
[00:31:30] <anonimasu> The LODTM is located in an 18,000 ft2 facility on the LLNL site. The facility was built in the early 1980s specifically to house the LODTM and it from environmental influences.
[00:31:48] <toast> that's the one
[00:33:13] <toast> fenn: llnl has a much bigger lathe than the lodtm
[00:33:16] <toast> i forget which one
[00:33:22] <fenn> i'm sure
[00:33:22] <toast> but it's nowhere near as accurate
[00:33:31] <anonimasu> hm
[00:33:41] <toast> it's somewhere on the microinch range
[00:33:42] <fenn> when i think telescope mirrors its usually like, house-sized stuff
[00:33:50] <anonimasu> so a capstan drive is a shaft between two rollers.. where the motor is mounted..
[00:34:04] <toast> the rollers have the motor
[00:34:20] <toast> yeah
[00:34:57] <toast> and it just drives the rod back and forth.
[00:36:25] <anonimasu> how heavy cuts can you take on that machine?
[00:36:33] <toast> uh, not very heavy
[00:36:39] <toast> i think they only leave couple millionths
[00:36:53] <anonimasu> each pass?
[00:36:58] <toast> no, total
[00:37:27] <anonimasu> How much material do you cut on that machine?
[00:37:33] <anonimasu> per pass I wonder.
[00:37:39] <toast> i don't know, but it's very tiny
[00:37:52] <toast> i'm saying the total amount they leave on it from the prior machine
[00:37:59] <toast> is only a few millionths of an inch
[00:38:29] <anonimasu> ok
[00:38:41] <fenn> why is diamond necessary for these supreme accuracies and small cut depths?
[00:39:22] <toast> the minimum depth of cut for any arbitrary tool is the tool's edge radius
[00:39:29] <toast> diamond holds an atomic edge
[00:39:57] <toast> plus it doesn't suffer from a built up edge, so they can spin the spindle at whatever speed it is most accurate
[00:40:22] <toast> and just leave it there
[00:42:34] <anonimasu> night
[00:43:11] <toast> nighty!
[01:07:08] <toast_> wtf wireless
[01:11:00] <Ziegler> ?
[01:11:08] <ds2> next task, wireless CNC controllers!
[01:11:16] <Ziegler> that would be cool
[01:11:42] <ds2> and wireless E-stop's ;)
[01:11:43] <Ziegler> any of you messed with doing an embeded linux system with emc running on it?
[01:12:27] <lerman> Yup.
[01:12:42] <Ziegler> yeah? what hardware?
[01:13:19] <lerman> A board called the marmalade. Had a built in LCD controller.
[01:13:26] <Ziegler> cool
[01:13:33] <Ziegler> any documentation of links?
[01:13:35] <Ziegler> or*
[01:13:53] <lerman> Unfortunately, the board was unreliable because of bad solder connections.
[01:14:13] <lerman> Also, used a board by Logic something or other.
[01:14:55] <Ziegler> decent clock speed?
[01:15:55] <lerman> Not real fast. Use an ARM based processor (an LH something or other).
[01:16:50] <lerman> It was used in a veterinary anesthesia machine I consulted on.
[01:17:23] <lerman> http://store.earthlcd.com/MDK-002-MDK002-mARMalade-ARM-Dev-Kit?sc=7&category=13
[01:19:10] <lerman> http://www.vetland1.com/ shows the machine.
[01:19:38] <lerman> But, as I said, they had problems with the processor board and changed to another one... I don't know which.
[01:20:14] <lerman> There are a bunch of similar boards out there. The neat thing about this board is that it supported a touch screen and LCD display.
[01:21:32] <lerman> http://www.logicpd.com/eps/som/sharp/LH79520/ is another one I looked at (I'm not sure of the model).
[01:22:22] <Ziegler> very cool
[01:22:31] <lerman> I did get the code working on that also. That company claimed to support Linux, but there support consisted of saying that they don't support drivers, etc.
[01:23:12] <lerman> I still have the prototype kit kicking around. It was quite expensive (around $1200 incl. the display.)
[01:23:25] <Ziegler> yeaowch
[01:24:17] <lerman> The big item was the display.
[01:24:32] <Ziegler> I suppose that follows
[01:25:49] <lerman> http://www.logicpd.com/eps/displaykits/LCD-6.4-VGA-10/ -- $800 for the display kit (6.4 inches).
[01:25:49] <ds2> isn't something like a gumstix more a better choice (alas, no included TS/LCD)
[01:27:11] <fenn> Ziegler: i'm playing around with netier xl1000's, not sure if that counts as embedded or not
[01:27:15] <lerman> The display is only part. The other part is the display driver. Driving an LCD requires a chip to handle it.
[01:27:38] <lerman> The LH... (whatever) has that built into the processor.
[01:28:15] <Ziegler> I dunno... I might take a step back and just go for a micro atx system running from a 500 meg flash card
[01:28:31] <Ziegler> not exactly the same
[01:28:30] <fenn> yep
[01:29:22] <Ziegler> but I think I might run into problems getting the hardware to be beefy enough to sequence and index an number of steppers
[01:29:28] <ds2> the gumstix uses the PXA255/270 which also has an internal LCD controller
[01:29:32] <Ziegler> micro-atx should make that easy
[01:29:38] <lerman> The question for Ziegler is how many he is going to need.
[01:29:47] <tomp2> i was going to suggest using a cheaper touch screen overlay from magic touch, but they have a new gizmo, you 'touch' on a projected imaged with a laser pointer ( they're looking at it with a cam )
http://www.magictouch.com/ViewTouch.html
[01:30:02] <Ziegler> yup... thats the other problem... I do need to buy 100 or 1000
[01:30:10] <Ziegler> I just want to play with a couple right now
[01:30:14] <lerman> If you are only making one, you don't want to spend a lot on development.
[01:30:29] <lerman> What's the app.
[01:30:43] <ds2> Ziegler: that's why I am saying gumstix, they tolorate single quantity purchases
[01:31:08] <Ziegler> not really formulated yet, but just a self contained controler
[01:31:43] <lerman> What interface stuff is needed? display, touchscreen, keyboard, network, serial, printer, ... ?
[01:31:44] <Ziegler> * Ziegler drank a bunch of coffee this morning and got a hair brained idea
[01:31:59] <jmkasunich> that coffee is bad stuff
[01:32:17] <fenn> i've noticed a lot of people have been anti-coffee lately
[01:32:39] <jmkasunich> does "all my life" count as lately?
[01:32:42] <Ziegler> I dont think I need network... but I need a way to comunicate with a driver, and if I could manage to get something like axis to work with a touch screen that might be neat
[01:32:43] <fenn> no
[01:32:45] <jmkasunich> just never acquired a taste for the stuff
[01:32:49] <fenn> me either
[01:33:00] <Ziegler> (this is dream mode right now... suppose I could ask for the world)
[01:33:18] <lerman> Axis should work fine with a TS.
[01:33:31] <lerman> If you don't mind writing some code.
[01:33:38] <fenn> why writing code?
[01:33:51] <Ziegler> someone already done that lef work fenn?
[01:33:53] <Ziegler> leg*
[01:33:53] <lerman> To make the TS look like a keyboard.
[01:34:04] <tomp2> they look like a mouse
[01:34:30] <Ziegler> yeah... seems like the majority of it could be done with touch of a button
[01:34:51] <lerman> Works for most things. But entering numbers is tough with a mouse.
[01:35:03] <Ziegler> ahh good point
[01:35:11] <fenn> http://matchbox-project.org/?p=1 <- on-screen keyboard
[01:35:23] <lerman> So, you have the 80% that requires 20% of the work done.
[01:35:36] <tomp2> think of on screen calculators... that good, that bad
[01:35:40] <lerman> Now write some code to integrate the parts.
[01:35:55] <fenn> i'd rather have a real keyboard.. they make totally sealed flexible silicone keyboards ya know
[01:36:19] <Ziegler> yes... I would not be against a key pad at the very least
[01:37:42] <lerman> mdi mode requires some letters, too.
[01:38:16] <Ziegler> yup
[01:39:33] <lerman> It's ironic that you can buy a complete real computer that you would have to spend on a single chip micro with the needed support stuff.
[01:39:50] <lerman> than
[01:39:54] <jmkasunich> yep
[01:39:57] <Ziegler> yeah
[01:40:14] <jmkasunich> I don't understand all the talk of microcontrollers I've been hearing here lately
[01:40:30] <Ziegler> ?
[01:40:31] <lerman> It's called economy of scale (or maybe competition).
[01:42:27] <lerman> I'm happy using a real processor for EMC. But it is unfortunate that (A) current processors X86 are not designed for real tim.
[01:42:43] <lerman> And (B) Linux is not designed for real time.
[01:43:33] <lerman> Even the RTlinux kernel changes are ineffective with some video boards, etc.
[01:44:25] <lerman> It would be nice to have a decent platform for real time stuff. (Well, linux isn't indecent, but it could be a lot better).
[01:45:14] <lerman> If I recall correctly, Solaris was a lot better than Linux in the RT department.
[01:45:19] <fenn> the development costs depend heavily on the microcontroller family
[01:45:46] <Ziegler> fanuc controls and the sort... they have thier own operating system?
[01:45:48] <fenn> you can get started with a few resistors and free software for some types
[01:45:53] <lerman> And the nature of the product being developed.
[01:46:25] <lerman> Ziegler: good question.
[01:46:54] <Ziegler> dont some controls runn of windows CE ?
[01:46:59] <fenn> ughhh
[01:47:06] <fenn> maybe for the UI they do
[01:47:11] <Ziegler> ah
[01:47:41] <fenn> there's certainly some kind of RT os sending the motion commands, on a separate processor if need be
[01:48:04] <Ziegler> I see
[01:48:09] <lerman> For our use, Linux is fine if you have servos.
[01:48:23] <Ziegler> not fine if you have steppers?
[01:48:31] <lerman> Trying to drive steppers a step at a time, though can be a hassle.
[01:48:32] <fenn> not fine if you are lerman
[01:48:41] <Ziegler> oh hehe
[01:48:55] <Ziegler> I do not have much experience with servo's
[01:49:07] <lerman> Adequate is not the same as ideal.
[01:49:20] <fenn> steppers are never "ideal" anyway
[01:49:51] <Ziegler> arnt't servo systems only as accurate as the encoder?
[01:49:57] <fenn> yes
[01:50:10] <Ziegler> cant you get encoders with steppers?
[01:50:15] <fenn> yes, but, why?
[01:50:20] <Ziegler> micro stepp the hell out of them?
[01:50:26] <tomp2> cnc manufacturers dont talk a lot about their hardware base. Heidenhain used TI and Motorola 68K for some series. Pmac is a TI DSP. Dunno whats in a Fanuc, likely varies, and they're big enuf to foundry unrecognizable chips.
[01:50:38] <tomp2> Pmac was
[01:50:57] <lerman> I built an os for the Data General Nova with a context switch time of a maybe 150 usec. That had a 1 micro second clock. Using todays processors that could be 150 nano seconds.
[01:51:29] <fenn> lerman: i thought the major issues were with processor pipelining
[01:51:43] <tomp2> when the cycle time approaches 0, the systems approach analog ;)
[01:51:48] <Ziegler> hehe
[01:51:53] <lerman> And cache, and I/O time, etc.
[01:52:13] <fenn> tomp2: fpga can get pretty darn near 0
[01:52:26] <tomp2> thats 'the calculus'
[01:52:47] <fenn> calculemus!
[01:53:58] <tomp2> yeh, as the step size approaches 0.... as the cycle time approaches 0...
[01:54:22] <lerman> Well... it's past my bedtime. See you later.
[01:54:34] <tomp2> bye
[01:54:40] <Ziegler> what sort of resolution can you get from a typical encoder?
[01:54:49] <fenn> more than enough
[01:54:54] <fenn> usually too much in fact
[01:55:05] <Ziegler> degrees?
[01:55:10] <fenn> say you have a 1024 line encoder spinning at 4000 rpm max
[01:55:23] <Ziegler> too much?
[01:55:37] <jmkasunich> 1024 line encoder = 4096 counts per rev
[01:55:46] <fenn> == 273 khz
[01:55:47] <jmkasunich> 3600 RPM = 60 revs/second
[01:56:15] <jmkasunich> 60 * 4096 = 245760 counts per second
[01:56:33] <Ziegler> what sort of processor is needed to keep track of that?
[01:56:39] <jmkasunich> hardware counting
[01:56:40] <Ziegler> or do most of the driver boards handle that
[01:56:59] <jmkasunich> software counting tops out at about 20-40 KHz, depending on the PC
[01:57:12] <ds2> a lot of processes have clock inputs
[01:57:15] <ds2> processors
[01:57:16] <tomp2> id say linear typical resolution was .001 mm ( common, not too expensive, useful ) ... rotary is rated lines/rev... so not 'measure', depends on how it;s connected/geared/electronicly multiplied ...
[01:57:47] <Ziegler> what about degrees of increment (trying to compare to stepper)
[01:57:56] <Ziegler> .9 degrees ?
[01:58:01] <fenn> average stepper is 200 steps/rev
[01:58:09] <fenn> not average.. standard i mean
[01:58:15] <Ziegler> right
[01:58:34] <jmkasunich> encoders range from 50 lines (200 counts) per rev, to 2500 lines (10000 counts) per rev
[01:58:44] <fenn> so 0.09 degrees for our hypothetical 1024 line encoder
[01:58:47] <Ziegler> wow!!!
[01:58:54] <jmkasunich> there are some that are even higher, but they're less mainstream
[01:59:11] <Ziegler> 200 count == 1.8 degrees 400 count .9 degrees
[01:59:20] <Ziegler> .09 is amazingh
[01:59:21] <fenn> also you must consider that microstepping is not perfectly linear, so you dont get the same level of accuracy out of microsteps as from an encoder
[01:59:35] <Ziegler> very true
[01:59:54] <Ziegler> do most servo drivers take care of the counting too?
[02:00:07] <fenn> yes
[02:00:13] <fenn> er.
[02:00:31] <Ziegler> got a brand I can google... entry level (ie... cheap) :D
[02:00:36] <fenn> usually you have an interface board and an amplifier board
[02:00:47] <fenn> no such thing as a cheap servo driver (yet)
[02:00:48] <Ziegler> oh?
[02:01:09] <Ziegler> cheap... ~$80 per axis?
[02:01:10] <tomp2> does 'servo driver' mean pc card here? like stg, m5i20, pmac ?
[02:01:18] <jmkasunich> not to me
[02:01:22] <jmkasunich> servo driver = power stage
[02:01:39] <jmkasunich> either analog or PWM input, direct connect output to motor
[02:01:43] <tomp2> me too, but i think the question had other intent
[02:02:19] <Ziegler> How much rougly are we talking for 3 axis entry level servo with EMC2
[02:02:27] <tomp2> Ziegler: what do you mean by 'servo driver' ?
[02:03:00] <Ziegler> I dunno tomp2... I only have experience with steppers at this point, and only generally understand servos
[02:03:47] <fenn> a G320 (brushed DC servo amplifier) is $114 per axis, but you also need an interface board
[02:03:58] <fenn> oh wait
[02:04:00] <fenn> that's a step/direction crap
[02:04:24] <fenn> am i going to have to bust open the hobby-cnc servo driver market?
[02:05:00] <Ziegler> yup
[02:05:10] <fenn> hah the g340 is MORE expensive than the g320
[02:05:20] <fenn> whats up with that
[02:05:34] <jmkasunich> step multiplier
[02:05:38] <jmkasunich> (I think)
[02:06:00] <fenn> gecko's website is terribly
[02:06:07] <fenn> uninformative
[02:06:50] <fenn> i mean the website part, the pdf's seem pretty good
[02:07:01] <tomp2> Ziegler: maybe you can browse these... good enuf for business use and they explain the bits you need to buy ( there's a few pcs needed for a system that emc can control ) there are many other mfctr's but this is a simple overview
http://web5.automationdirect.com/adc/Overview/Catalog/Motion_Control/Servo_Systems/Low_Inertia_(100W_-_1KW)_Servo_Systems/100W_Servo_System_(Low_Inertia)
[02:07:22] <Ziegler> so I couldnt hook up a servo to one of those drives, and hook it up to a parallel port?
[02:07:36] <Ziegler> thanks tomp2
[02:07:55] <fenn> with the gecko drives you could ( i think)
[02:08:31] <fenn> but you lose a lot of the advantages of servos because it's interfaced to as if it were a stepper motor
[02:09:46] <Ziegler> can get the speed with paraport?
[02:09:48] <tomp2> Ziegler: that system i posted is hooked to a parport AND to a 'DAC' ( thingy that takes a number and outputs an analog voltage, in servo drives, often +/- 10V for max fwd speed to max reverse speed ) The parport is just enables and limits and 'imonfire'
[02:10:11] <Ziegler> im on fire?
[02:10:15] <tomp2> ;)
[02:10:27] <tomp2> error input from the amplifier
[02:10:32] <Ziegler> LOL
[02:10:39] <tomp2> oh, ampli fire
[02:10:58] <Ziegler> hehe
[02:11:58] <fenn> tomp2: ever been to this place?
http://www.bunniestudios.com/blog/?p=147
[02:12:18] <Ziegler> nope
[02:12:46] <Ziegler> cool
[02:12:59] <Ziegler> you been?
[02:13:08] <fenn> no i just read about it today
[02:15:22] <Ziegler> ahh.. just noticed you directed that at tomp2
[02:15:37] <Ziegler> :-|
[02:15:39] <tomp2> been places like it... panThip Plaza in KrungThep, places in Singapore & Taiwan like that too, floors & floors of neat hdwr and software... serious problems in that you wanna buy loads of stuff... got an iPaq repaird in TaiChung's 'electronics alley' very cheap
[02:16:14] <tomp2> fenn: never been to that one tho... now got a new destination thanks
[02:17:21] <tomp2> see the 'electric thing' characters? :)
[02:17:23] <fenn> interesting blog.. its about a chinese-american electronics engineer setting up a production line
[02:18:11] <fenn> i recognize the characters; it's more complex in japanese though
[02:18:18] <fenn> usually the other way around
[02:19:58] <fenn> 電子
[02:20:32] <Ziegler> woah that actually showed up right on my end
[02:21:47] <tomp2> cool , dian tzi
[02:22:08] <fenn> hooray for unicode
[02:23:18] <fenn> i can never get chinese websites to display right
[02:24:11] <fenn> i think i should learn chinese
[02:25:55] <tomp2> they have too many standards ;) dozens of unicode standards for chinese . But this rolls back to the touchscreen idea... see a keyboard is crazy in chinese.. you have to press a bunch of buttons to get a single glyph... so apple & ibm are battling it out with tts & stt over there
[02:26:23] <fenn> vhs vs betamax
[02:26:50] <tomp2> texttospeech and speech to text... no keyboard, just talk to it
[02:27:09] <fenn> oh
[02:27:19] <fenn> there is a japanese kanji method called skk
[02:28:04] <tomp2> how many kepressess for a single character?
[02:28:09] <tomp2> keypresses
[02:28:47] <fenn> i forget which is which, but, in the one i like you type the phonetic string, then when you press space bar a list of kanji's comes up, and you space-bar down to the correct one and press enter
[02:29:00] <fenn> the other one tries to figure it out from context
[02:29:04] <fenn> wnn is the other one
[02:29:41] <tomp2> ah, like pinyin... phonetic to glyph... yes often brings up a suggestion list ( stupid farang... you mean this? or this ?)
[02:29:42] <fenn> these may only exist in linux-dom for all i know
[02:30:43] <tomp2> hmmm, what about lirc instead of touchscreen... very universal concept... not lanuage bound
[02:31:18] <fenn> how is that better than pressing buttons on a screen?
[02:31:31] <fenn> but then you have the added failure point
[02:31:54] <fenn> a remote control could be very useful though
[02:31:55] <tomp2> the screen changes what the buttons mean (visual cues)
[02:32:08] <tomp2> soft keys
[02:32:12] <fenn> wait, define "lirc" please
[02:32:17] <tomp2> apples menu bar..
[02:32:30] <fenn> huh?
[02:32:40] <Ziegler> I though you were talking about the infra red control
[02:32:42] <tomp2> lirc is a linux project for 'remote' s to control apps
[02:33:11] <tomp2> http://www.lirc.org/
[02:33:16] <tomp2> yes the ir control
[02:34:40] <tomp2> people in afganistan and england can use same device w/o bein very computer literate (no offense to either co.. make it US and Taiwan if you like )
[02:36:05] <fenn> yes even hoohas in sweden and germany
[02:36:10] <fenn> ;)
[02:36:31] <fenn> oh wait ziegler is in illinois..
[02:36:51] <Ziegler> hehe
[02:37:09] <tomp2> the idea of symbols and pointers versus trying to imitate speech ( typing is imitating speech... in your head you assemble words and 'read' them... silly, why not talk or point
[02:37:42] <tomp2> Ziegler: you in illinois?
[02:37:50] <fenn> hmm.. programming is not very much like speech
[02:38:06] <Ziegler> yes
[02:38:13] <tomp2> programming is like thinking in speech ;)
[02:38:19] <tomp2> i'm from elgin
[02:38:28] <tomp2> but in detroit now
[02:38:37] <Ziegler> ahh QC here
[02:39:18] <Ziegler> Cousin of mine got a job as a police officer near elgin
[02:39:38] <tomp2> did i say elgin, i meant peoria ;)
[02:39:55] <Ziegler> hehe
[02:40:06] <tomp2> off to ice machine, bbl
[02:40:19] <Ziegler> night all
[02:40:21] <Ziegler> sleep time
[02:40:26] <fenn> ciao
[03:08:17] <a-l-p-h-a> has anyone used ubuntu as an CD boot OS system only, or off an USB key??
[03:08:35] <toast_> yes and i hated it
[03:08:49] <toast_> i don't know what it was, but it was very, very slow from the CD
[03:08:53] <toast_> slower than other distros
[03:09:09] <toast_> but i am going to sleep
[03:12:52] <a-l-p-h-a> toast_, cool thanks
[03:20:57] <ds2> what do they use to secure the turret between moves in a lathe ?
[12:02:35] <anonimasu> hm
[12:02:40] <anonimasu> jepler/cradek
[12:02:54] <anonimasu> im looking for the source of the hal.py and nml.py libraries
[12:03:23] <jepler> ./src/emc/usr_intf/axis/extensions/emcmodule.cc
[12:03:23] <jepler> ./src/hal/halmodule.cc
[12:03:27] <jepler> bbl
[12:03:46] <anonimasu> im going to port thoose to c#
[12:15:59] <Guest342> logger_emc: bookmark
[12:15:59] <Guest342> Just this once .. here's the log:
http://www.linuxcnc.org/irc/irc.freenode.net:6667/emc/2007-08-07.txt
[12:17:36] <Guest342> Guest342 is now known as skunkworks_
[12:18:38] <alex_> alex_ is now known as The_Ball
[12:23:20] <skunkworks_> The_Ball: how are things over there?
[12:24:30] <The_Ball> skunkworks_, hey there, long time
[12:25:05] <The_Ball> skunkworks_, frightfully busy at work and uni, so I have not touched the mill at all ;(
[12:25:31] <skunkworks_> I know exactly what you mean
[12:26:03] <The_Ball> hopefully things will quiet down soon, too many balls in the air
[12:26:19] <skunkworks_> only excitement here is I got an engraver cheap.
http://www.electronicsam.com/images/engraver/engraver.JPG
[12:29:50] <alex_joni> skunkworks_: running already?
[12:31:18] <skunkworks_> one axis. I have to solder up some cables
[12:31:34] <alex_joni> cool
[12:32:23] <jepler> The_Ball: did you ever get a chance to test the PWM to +-10V converter circuit with the pluto?
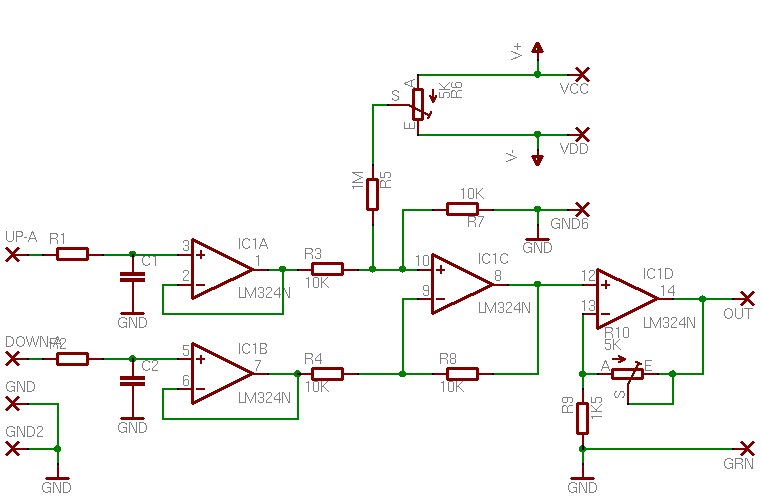
[12:34:03] <The_Ball> jepler, no, I did build them, but have been stopped dead in my tracks. I will do it, but I can't tell you when
[12:34:54] <The_Ball> skunkworks_, cool engraver, any backlash in it?
[12:35:28] <jepler> The_Ball: ok, no sweat
[12:35:36] <jepler> The_Ball: did you put a schematic of the board online somewhere?
[12:40:24] <The_Ball> jepler,
http://wigen.net/pwmtoanalog.png
[12:40:58] <jepler> The_Ball: thanks, mind if I pass this off to someone else interested in analog control from pluto?
[12:41:03] <The_Ball> of course not
[12:41:54] <jepler> great
[12:43:09] <skunkworks_> The_Ball: they are spring loaded nuts. :)
[12:45:26] <The_Ball> skunkworks_, ok, that's fine for engraving right?
[12:46:04] <skunkworks_> oh - right. It should do circuit gards and such also
[12:46:30] <skunkworks_> m:
[12:46:32] <The_Ball> how about spindle?
[12:46:33] <skunkworks_> oops
[12:46:41] <skunkworks_> it is 150w I think
[12:46:53] <skunkworks_> 20Krpm max
[12:47:57] <The_Ball> that should do you
[12:48:38] <skunkworks_> I was zipping the one axis I hooked up at 150ipm with the small 1.7a steppers.
[12:48:47] <skunkworks_> 120ipm I mean
[12:49:06] <The_Ball> hey, that's handy
[12:50:54] <anonimasu> what can you machine with 150W?
[12:51:09] <skunkworks_> plastic :)
[12:51:12] <anonimasu> :/
[12:51:19] <skunkworks_> actually lots of things.
[12:52:03] <anonimasu> aluminium?
[12:52:12] <skunkworks_> it is 125w though now that I look at the specs
[12:57:04] <skunkworks_> looking at the table - it cuts aluminum.. ;)
[12:57:13] <anonimasu> depth of cut?
[12:57:18] <anonimasu> I have a 320w spindle motor :)
[12:57:20] <anonimasu> 27krpm
[12:57:34] <skunkworks_> how does that do?
[12:57:41] <anonimasu> im not using it for anything yet
[14:03:15] <anonimasu> jepler: Im not getting this to make too much sense
[14:11:21] <anonimasu> aw wtf.
[14:11:25] <anonimasu> I'll wrap python :)
[14:17:35] <anonimasu> but I'd rather not
[14:19:41] <skunkworks_> I like wrapping presents
[14:20:09] <anonimasu> not thats not the same thing :)
[14:21:00] <archivist> unwrapping is more fun
[14:33:32] <skunkworks_> so - there should be no problem running the kde desktop with emc - right?
[14:35:46] <cradek> no, that works fine
[14:36:01] <cradek> some people are using kubuntu 6.06
[14:37:01] <skunkworks_> cool
[14:38:12] <jepler> among the kde users are swpadnos
[14:39:18] <skunkworks_> do you guys snicker and point?
[14:40:46] <cradek> nah
[14:42:30] <jepler> I hear that some consider my desktop to look ugly, though.
http://emergent.unpy.net/files/sandbox/desktop.png
[14:42:57] <jepler> ah the breathtaking beauty of simplicity!
[14:43:13] <skunkworks_> I think it looks clean.
[14:43:32] <cradek> the red and green are distracting and unnecessary
[14:44:02] <jepler> since then I've chosen better colors for those meters
[14:44:18] <archivist> not enough clutter error at sofa
[14:44:22] <jepler> black, grey, blue
[14:44:56] <skunkworks_> the compaq I am using for the engraver throws a latency error when it goes into the blank screen.. From what I read - I cannot turn the powersaving/suspend times in gnome. (Looks like I could edit the xorg file though)
[14:45:35] <jepler> some combination of these should fix it: xset s off; xset -dpms; killall xscreensaver gnome-screensaver
[14:45:50] <jepler> (turn off screensaver; disable monitor powersaving features; kill screensavers)
[14:46:34] <skunkworks_> Thanks - will that stay on a reboot?
[14:47:19] <jepler> no
[14:48:15] <cradek> in xorg.conf, remove Option "dpms"
[14:50:34] <skunkworks_> I found this -
http://ubuntuforums.org/showpost.php?p=2054112&postcount=6
[14:50:53] <jepler> that would probably work as well
[14:51:52] <jepler> but you're not using xgl so why doesn't gnome-power-properties work for you?
[14:51:57] <jepler> er, gnome-power-preferences
[14:54:33] <jepler> failing that, apparently you can laboriously use the Sessions program to make something run whenever you log in:
http://www.gnome.org/learn/users-guide/2.14/gosstartsession-2.html
[14:55:10] <jepler> there is or used to be something called .gnomerc (a shell script run at login) but I don't find it mentioned in gnome's documentation and most of the hits are complaining that it doesn't seem to work right
[14:55:58] <skunkworks_> hmm
[14:56:09] <skunkworks_> will have to play with it tonight
[15:05:47] <skunkworks_> I may have overlooked the gnome-power-preferences menu item..
[15:10:43] <skunkworks_> what does 'nice' stand for?
[15:14:19] <skunkworks_> or does it literally mean - one program is nicer to another by using less processor time
[15:14:37] <cradek> yes that's it exactly
[15:14:51] <skunkworks_> I thought it was an acronym ;)
[15:15:08] <cradek> a niced program only gets the CPU when nobody else wants it
[15:15:57] <cradek> actually there are different levels of nice, but that's the general idea
[15:16:31] <cradek> you might set a screen saver as the nicest, batch processing stuff as a little bit nice, and interactive programs as not nice at all
[15:17:53] <skunkworks_> Thank you.
[15:53:37] <anonimasu> hm
[15:59:53] <lerneaen_hydra> will nice be affected majorly by the new task planner in the linux kernel?
[16:41:28] <skunkworks_> http://www.cnczone.com/forums/showpost.php?p=326147&postcount=494
[16:57:06] <toast_> ds2: what do you mean, secure a turret between moves on a lathe
[17:46:38] <ds2> toast_: just that.... on a CNC turret lathe, after the turret spins, what prevents cutting forces from turning the turret
[17:46:52] <toast_> face gears
[17:46:54] <toast_> meshing face gers
[17:47:02] <toast_> *gears
[17:47:03] <ds2> but gears have backlash
[17:47:08] <ds2> wouldn't the tool jiggle?
[17:47:08] <toast_> no no, these aren't like
[17:47:12] <toast_> drive gears
[17:47:20] <toast_> these have teeth on the side
[17:47:25] <archivist> no the have pegs
[17:47:26] <toast_> and they don't rotate, they just lock together
[17:48:00] <ds2> still don't see how they would not have backlash
[17:48:01] <toast_> no backlash, no extra play
[17:48:14] <toast_> hold your fingers out, face toward each other
[17:48:18] <toast_> stretched out, then mesh them together
[17:48:26] <toast_> until you can't move them back and forth
[17:48:29] <lerneaen_hydra> is the data on the wiki under the gnu fld?
[17:48:58] <JymmmEMC> fld?
[17:49:02] <ds2> hmmmm so you mean the teeth are tapered and the gears mesh against the taper?
[17:49:04] <lerneaen_hydra> *fdl
[17:49:07] <ds2> archivist: pegs?
[17:49:13] <JymmmEMC> fdl?
[17:49:23] <lerneaen_hydra> free document license
[17:49:31] <lerneaen_hydra> like gpl but for manuals and so on
[17:49:37] <JymmmEMC> ah
[17:49:40] <archivist> or slot and retaining device
[17:49:59] <toast_> or hydraulic motor
[17:50:02] <ds2> doesn't that mean the rotating mechanism needs to be very precise?
[17:50:21] <toast_> nah, any method they use generally is self-aligning
[17:50:29] <toast_> through the use of tapers/etc
[17:50:31] <archivist> and some play is allowed as the support is built into the tool holder
[17:50:39] <ds2> Hmmm
[17:51:25] <archivist> bit of slop on a capstan never hurts
[17:52:18] <ds2> sounds like it is a very complex affair to even comtemplate building a small turret for a bench top CNC lathe
[17:52:40] <toast_> you could use the pin method pretty easily, as archivist suggested
[17:52:50] <toast_> very similar to a index plate
[17:54:03] <lerneaen_hydra> a very manly method would to attach the tools to a plate, that's attached to a very large servo motor (1:1)
[17:54:09] <lerneaen_hydra> and have a very high-res encoder
[17:54:16] <archivist> machine the mountings with the machine after the indexing system is built and tested to make sure of alignment
[17:54:17] <toast_> that's how crankshaft lathes do it
[17:54:25] <lerneaen_hydra> not to mention that you'll be able to change tools quickly
[17:54:29] <toast_> large servo
[17:54:42] <toast_> they use like, 80 tool turrets
[17:54:42] <lerneaen_hydra> toast_: but I assume they have a gearbox?
[17:54:50] <lerneaen_hydra> and a locking pin
[17:54:50] <toast_> and turn the turret into a saw
[17:54:53] <ds2> a 4 tool turret is sufficient
[17:54:56] <toast_> nah, no locking pin
[17:55:01] <lerneaen_hydra> toast_: oh, cool
[17:55:06] <toast_> the whole turret becomes a milling machine
[17:55:07] <lerneaen_hydra> lots of current through the servo though
[17:55:17] <lerneaen_hydra> oh, yeah
[17:55:19] <lerneaen_hydra> I think I saw that
[17:55:30] <ds2> for a tiny 3/8" lathe bit, what kind of forces are on the tool holder anyways? 2000PSI?
[17:55:34] <lerneaen_hydra> syncronised rotation too right?
[17:55:46] <lerneaen_hydra> syncronised with the spindle
[17:55:50] <toast_> uh, you mean C axis contouring
[17:55:51] <toast_> yes
[17:55:58] <lerneaen_hydra> yeah exactly
[17:56:01] <toast_> i was thking "synchronized with the turret?"
[17:56:10] <toast_> then realized, no, dummy, that's not what he's talking about
[17:56:21] <lerneaen_hydra> haha
[17:57:15] <ds2> think simple...
[17:57:25] <toast_> ds2: index plate and a pin, archivist's idea
[17:57:37] <ds2> tool changing is annoying. a turret would make the experience more enjoyable
[17:57:49] <toast_> use a simple cam acting against a high pressure spring
[17:57:54] <toast_> to pop the turret out of the pin position
[17:58:03] <lerneaen_hydra> ds2: yep, a lot easier to make
[17:58:09] <toast_> index it either by hand or by a low-accuracy method of any kind
[17:58:21] <ds2> ah a CAM
[17:58:21] <archivist> solenoid
[17:58:22] <toast_> and then, the cam rotates away to drop it back in, and the pins locate the turret in the hole.
[17:58:35] <toast_> you can turn a simple cam with a 4 jaw chuck!
[17:58:43] <ds2> archivist: Solenoids seem weak...
[17:59:23] <archivist> can be, can be powerful with enough copper
[17:59:37] <toast_> the problem with using a cam, instead of hydraulics
[17:59:43] <toast_> is that it will limit you to turning in one direction only
[17:59:46] <ds2> what about putting the pin on the end of a tiny lead screw coupled to a DC motor and just blind drive it til it stalls?
[17:59:47] <toast_> you will not be able to take left handed cuts
[18:00:09] <ds2> toast_: eh? thought meant to use the cam to push the locking pin?
[18:00:12] <toast_> no
[18:00:17] <toast_> the cam pushes the whole turret out
[18:00:22] <toast_> the pin is fixed
[18:00:27] <ds2> Oh
[18:00:41] <toast_> it's a lot more repeatable that way
[18:00:45] <ds2> ah I see
[18:00:56] <toast_> except on "commercial" lathes they just tap into the hydraulics system
[18:01:50] <toast_> some things use a cam, but they have a secondary locking mechanism to keep the turret from drifting out in a left hand cut
[18:02:02] <toast_> you could use two cams, i guess
[18:02:13] <toast_> one to unlock it, one to lock it firm
[18:02:58] <toast_> you could use another pin of some kind to lock it..
[18:03:00] <toast_> i dunno.
[18:04:19] <ds2> there is one other option with a cam -
[18:04:27] <ds2> make the turret horizontal instead of vertical
[18:04:35] <toast_> true!
[18:04:36] <toast_> very true.
[18:04:49] <ds2> I think there is a hardinage that does that
[18:05:28] <toast_> yar
[18:05:36] <toast_> a manual one
[18:05:50] <toast_> also an older cnc that has a secondary horizontal turret
[18:05:52] <ds2> I used a clone of a hardinage (CNC, 0T control) that had it
[18:06:13] <ds2> only problem is that thing was plagued with turret not seating back properly
[18:06:16] <toast_> hardinge does seem to like the horizontal turret
[18:07:03] <ds2> but on a 8x20 lathe, a horizontal turret might use up too much room
[18:07:10] <toast_> yeah
[18:07:17] <toast_> it is way more rigid, though
[18:07:30] <ds2> it seems all the tiny 4/8 position turrets for the bench tops are vertical
[18:07:48] <toast_> a lot of them
[18:10:44] <toast_> i personally like the face gear method
[18:10:56] <toast_> highest repeatablity, good holding
[18:11:09] <ds2> i personally would like to buy one... but I suspect it'll cost more then the lathe :(
[18:11:10] <toast_> unfortunately it's also the most difficult to manufacture
[18:11:15] <toast_> takes time
[18:11:36] <ds2> if I was doing an apprenticeship program, I might agree with you on the face gear method
[18:11:49] <toast_> haha, as long as you didn't have to be the one to make it
[18:11:54] <toast_> AM I RIGHT
[18:12:04] <toast_> but i think if you used an index plate type apparatus
[18:12:06] <toast_> with several pins
[18:12:09] <toast_> you'd be good
[18:12:13] <ds2> no, I think if I will do all the work, I want credit for it
[18:12:20] <toast_> 8 pins, 8 holes
[18:12:24] <toast_> decently sized pins and holes at that
[18:12:34] <ds2> what's decent sized?
[18:12:42] <toast_> i really don't know the size of your lathe
[18:12:47] <toast_> i would guess, and just make them large
[18:12:51] <ds2> I don't even know what magnitude of forces I would have to expect
[18:12:55] <toast_> not very much
[18:13:03] <ds2> but I suspect anything larger then the toolbit size is overkill
[18:13:07] <toast_> yeah
[18:13:56] <toast_> but then i'd have a few pins radially, linked to that central eject thing
[18:14:00] <toast_> i like the spring and a cam idea
[18:14:25] <toast_> with the final lock being pins in the perhipery as well as pins in the face
[18:14:29] <archivist> you may need forced removad
[18:14:37] <ds2> from a simplicity standpoint, I like to put the pin on the end of a lead screw and just drive the leadscrew till it stalls
[18:14:46] <toast_> ?
[18:14:52] <toast_> i don't see what you're describing
[18:14:57] <ds2> and force removal is just revering the lead screw
[18:15:06] <ds2> toast_: think of the pin as a bolt
[18:15:18] <toast_> sure
[18:15:19] <ds2> and I just turn the bolt til the head hits something
[18:15:25] <toast_> oh
[18:15:27] <toast_> sure
[18:15:28] <ds2> I assume that is okay with a DC motor ;)
[18:15:43] <toast_> also you have to support it so that the turret doesn't turn with the leadscrew
[18:15:47] <ds2> and force removal is just reversing the motor
[18:15:52] <JymmmEMC> WTH? Note last bullet...
http://cgi.ebay.com/CNC-Robotics-Parallel-Port-Breakout-Board_W0QQitemZ110154184119QQihZ001QQcategoryZ78196QQssPageNameZWDVWQQrdZ1QQcmdZViewItem
[18:16:34] <ds2> i should find time to draw a sketch so I don't forget
[18:17:05] <JymmmEMC> * JymmmEMC hands ds2 his crayons
[18:17:43] <ds2> what about those big sheets of recycled paper that goes on the short easels? =)
[18:18:00] <JymmmEMC> ds2: use the wall like every other kid!
[18:18:12] <toast_> s/wall/autocad2007
[18:18:24] <ds2> ewwwww autocad
[18:18:32] <archivist> s/autocad/solidworks
[18:18:40] <ds2> since we are using imaginary budgets... solidworks!
[18:18:41] <toast_> s/solidworks/proe3.0
[18:18:53] <ds2> I would sooner draft with mastercam then with autocad!
[18:18:55] <toast_> i can't figure out how to do drawings in pro/e
[18:19:11] <archivist> i cant think in 2d any more
[18:19:15] <toast_> so i stick with solidworks
[18:20:24] <ds2> getting back to real budgets... I'll use Rhino
[18:20:27] <jepler> JymmmEMC: re the ebay auction -- a series resistor can provide some protection against out-of-spec voltages .. and everyone overstates how good their items are on ebay
[18:20:31] <toast_> getting back to bittorrent, you mean
[18:20:43] <ds2> all my software is licensed
[18:20:52] <toast_> unfortunate!
[18:21:37] <jepler> * jepler applauds ds2
[18:21:43] <JymmmEMC> jepler: Eh, it was the verbage... resistor != isolation imo. =)
[18:22:14] <JymmmEMC> all of ds2's software comes from the dumpster.
[18:22:35] <jepler> as a Free software advocate, I think it's very important to make sure all software is used legally, because only the copyright system protects Free software from being stolen by the dishonest
[18:22:44] <ds2> JymmmEMC: that may be, but it is licensed! I have the shiney holograms :P
[18:23:14] <JymmmEMC> ds2: Heh, you might want to read the EULA on some of those sometime.
[18:23:55] <toast_> the EULA on my software says that someone named "J4c0Bz" wants to give props to "3v1l"
[18:24:00] <ds2> JymmmEMC: actually, I did... most of it is older stuff that don't have problems with transfers
[18:24:28] <ds2> and for OS's, I reuse the machine so OEMs are not arugment either :P
[18:28:45] <ds2> jepler: that may be true.. but commericial software is just lacking in interesting functionality... so there is no interest in it at all
[18:32:28] <JymmmEMC> * JymmmEMC lol @ toast_
[18:34:09] <jepler> ds2: FPGA toolchain, navigation software, games, and of course all the software in appliances are instances of commercial / non-Free software I use
[18:34:57] <jepler> ds2: of those I'd most love to see an all-GPL FPGA toolchain
[18:35:26] <ds2> jepler: I find prefectly acceptable versions of almost all software at a price range that is acceptable
[18:35:36] <alex_joni> do appliances count?
[18:35:39] <ds2> jepler: a lot of the FPGA toolchains are free but not GPL
[18:36:21] <jepler> ds2: yeah, you can get no-cost toolchains from at least altera and xilinx, but Free (GPL) would be better
[18:36:49] <jepler> oh, I forgot a big one -- the software in my cellphone
[18:37:01] <alex_joni> jepler: how about your car?
[18:37:14] <alex_joni> and elevators you use at work
[18:37:15] <alex_joni> :P
[18:37:19] <ds2> jepler: actually, in that case, GPL is secondary... I much rather they just give me the bitstream specs so I can do other cool stuff with it ;)
[18:37:25] <alex_joni> and a bazillion other places
[18:37:36] <ds2> you do NOT use a linux phone? ;)
[18:38:28] <jepler> ds2: if a big fpga manufacturer gave bitstream specs I am sure the Free toolchain would show up as fast as cadres of pudgy geeks could write it
[18:38:49] <JymmmEMC> defibrillator GPL
[18:38:57] <alex_joni> ds2: openMoko
[18:39:08] <ds2> GPL tools is just a secondary thing... bitstreams would let you have self modifying hardware among other
[18:39:27] <ds2> alex_joni: among other projects
[18:39:32] <jepler> alex_joni: unlike my car, I frequently wish I could modify the software in my phone. it sure belongs on the list, though
[18:39:58] <JymmmEMC> jepler: get an unlocked phone
[18:42:12] <alex_joni> jepler: write java apps :))
[18:43:32] <skunkworks_> pudgy geeks?
[18:44:06] <alex_joni> skunkworks_: kinda like in here
[18:44:48] <skunkworks_> ;)
[18:46:19] <JymmmEMC> would terminal strips fit in this?
http://cgi.ebay.com/DB25-male-connector-breakout-prototype-PCB-board-kit_W0QQitemZ110156453779QQihZ001QQcategoryZ36327QQssPageNameZWDVWQQrdZ1QQcmdZViewItem
[18:46:51] <jepler> alex_joni: stop trying to troll me
[18:47:16] <toast_> i trolled a man once
[18:47:24] <jepler> toast_: just to see him reply?
[18:47:37] <alex_joni> jepler: I was half-serious
[18:47:37] <toast_> hahaha
[18:47:49] <toast_> actually that was a variant on my standard "i shot a man once"
[18:47:50] <alex_joni> most "modern" phones can run custom java apps
[18:48:20] <anonimasu> * anonimasu hugs the smartphone
[18:48:40] <toast_> oooh i just thought of an awesome troll
[18:48:41] <jepler> alex_joni: writing java apps won't let me (A) fix the way my phone completely crashes sometimes or (B) the way "silent mode" is applied to text messages, to name two things that bug me on my current phone
[18:48:50] <jepler> I don't want to run some new application on my phone, I just want my phone to work better
[18:48:53] <toast_> also my phone has a number pad
[18:48:55] <toast_> i can call people on it
[18:48:58] <toast_> can yours do that
[18:49:01] <toast_> mr. smarty pants
[18:49:04] <alex_joni> jepler: oh, there's an easy way to fix that then
[18:49:06] <anonimasu> yes it can :)
[18:49:11] <toast_> oh =(
[18:49:28] <alex_joni> jepler: get a 'better' one
[18:49:36] <alex_joni> where 'better' != 'newer'
[18:50:10] <ds2> being able to run java is like being able to speak english...there is no real assurance the other guy will understand you ;)
[18:50:31] <anonimasu> hehe
[18:50:31] <alex_joni> ds2: HAHAHA
[18:50:34] <toast_> ahahahahah
[18:51:44] <JymmmEMC> jepler:
http://cgi.ebay.com/NEW-UNLOCKED-BLUE-RIZR-Z3-ELITE-THE-ONLY-USA-EDITION_W0QQitemZ150148012480QQihZ005QQcategoryZ64355QQcmdZViewItem
[18:51:54] <ds2> try asking the wrong guy for a 'torch' while fixing a gas leak and see what you get ;)
[18:51:55] <anonimasu> how many times have you posted that he last month?
[18:52:27] <toast_> we need a url counter
[18:52:31] <toast_> for a definitive answer.
[18:52:37] <toast_> the metrological solution!
[18:52:54] <JymmmEMC> anonimasu: google it and find out
[18:52:59] <JymmmEMC> google knows all
[18:54:18] <alex_joni> ds2: you made it into the emc bash.org :P
[18:54:32] <anonimasu> toast_: cat emc.log |grep "NEW-UNLOCKED-BLUE-RIZR-Z3" |wc -l
[18:54:56] <toast_> can has cheezburger?
[18:58:54] <alex_joni> ds2:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?IRCquotes
[19:00:03] <skunkworks_> I think my quote about having a large circle to calculate Pi should have made it.. ;)
[19:00:16] <anonimasu> :)
[19:00:34] <anonimasu> skunkworks_: I must have missed that one
[19:02:13] <toast_> i calculated pi once
[19:06:41] <ds2> =)
[19:06:45] <alex_joni> I ate pie once
[19:08:06] <lerneaen_hydra> pi ate me once, it wasn't pleasant
[19:08:45] <anonimasu> ^_^
[19:11:49] <JymmmEMC> Glory be I CAN SEE!!!
[19:12:24] <JymmmEMC> ds2: Longs has 4pk of 100W CFL for $0.99 (23W)
[19:18:07] <ds2> and?
[19:18:39] <ds2> I have gotten sick of cut rate CFL's that die after a few months so unless it is a well established brand...
[19:39:26] <toast_> toast_ is now known as toastydeath
[20:02:33] <alex_joni> g'night all
[20:43:52] <jlmjvm> jmkasunich:are you here
[20:44:34] <cradek> people rarely answer that question
[20:44:46] <cradek> it's best to just say/ask what you want
[20:45:04] <cradek> then maybe someone else can help, or jmkasunich will see it when he comes around
[20:45:27] <jlmjvm> just wanted to say i finally got my stepper motors working properly
[20:45:39] <cradek> great!
[20:46:01] <fenn> what was the problem?
[20:46:11] <jlmjvm> seems i didnt have it wired right
[20:46:37] <fenn> how so?
[20:46:52] <jlmjvm> if you wire it to the gecko with 4 wires,the other wires get connected to themselves
[20:47:11] <jlmjvm> i just had the other 4 capped off
[20:47:20] <anonimasu> jlmjvm: got a current limit resistor?
[20:47:26] <jlmjvm> wouldnt do anything
[20:47:34] <anonimasu> Do you have one?
[20:47:36] <jlmjvm> yes,270k
[20:47:42] <anonimasu> great
[20:47:55] <anonimasu> _if_ you do run without them your drives blow up eventually.
[20:48:01] <anonimasu> ^_^
[20:48:14] <jlmjvm> g203v
[20:48:36] <anonimasu> well, that's obviously after the motors die..
[20:49:01] <fenn> uh, 270k cant be right
[20:49:02] <jlmjvm> they would work with all 8 wires connected,but would send the 203v into a fault
[20:49:23] <jlmjvm> now they are running fantastic
[20:50:06] <jlmjvm> just wanted to thank everyone that helped
[20:50:58] <jepler> jlmjvm: you mean your current set resistor is 270k?
[20:51:21] <jlmjvm> now i can order my encoders and try to set this mill up so i can get a ferror if it goes out of position
[20:51:29] <jlmjvm> yes 270k
[20:51:39] <fenn> hm i looked at the manual and it fits the formula there, so nevermind
[20:51:54] <fenn> jepler: its not a ballast resistor or a sense resistor
[20:52:12] <fenn> dunno why they dont just use a trim pot
[20:52:33] <ds2> maybe it is part of a current multipling mirror
[20:52:50] <cradek> because people can pick out a resistor better than they can measure chopping current with a scope
[20:53:12] <ds2> bah...people just need to own advance DSO's ;)
[20:53:13] <jlmjvm> had my quill doing 140 ipm awhile ago,looked and sounded great
[20:53:16] <fenn> well just put tick marks on the board
[20:53:19] <jepler> what's that give you -- 6A?
[20:53:31] <jlmjvm> yep,6a
[20:53:48] <JymmmEMC> fenn: I thought that too, but pots get dirty, etc.
[20:53:58] <fenn> jymmm so?
[20:54:30] <JymmmEMC> fenn: so that 6a just went to1A and you're going WTF happened
[20:55:09] <fenn> so your crappy solder joint breaks because you were doing it in the dark with a cold-heat iron while hanging upside down..
[20:55:16] <jlmjvm> will adding some us digital encoders and reading them into emc be a big ordeal,will have to add another parallel port?
[20:55:41] <JymmmEMC> fenn: be realistic, pots do get dirty and changed their vlaues
[20:56:18] <JymmmEMC> fenn: not like you will be changing the setting monthly. and resistors are not expensive
[20:56:26] <fenn> that's not the point
[20:56:33] <fenn> its a bad user interface
[20:56:45] <fenn> its like saying "oh its just a couple lines of C"
[20:56:56] <fenn> just get out your soldering iron and recompile
[20:57:01] <JymmmEMC> fenn: Correct, it is *NOT* a user interface, it's a one-tiime setting.
[20:57:58] <fenn> actually its a terminal connector but meh
[20:58:16] <ds2> it is cost thing, a single turn pot can be a pain to set accurately and if you have 3 of them to match up, it can get touchy compared to a simple 5% tol or 1% tol resistor
[20:58:23] <ds2> alternative is a 15turn but...
[20:58:37] <fenn> oh come on, the damn things cost $150 i'm sure he can afford a multi turn pot
[20:58:38] <cradek> 4 dip switches and 4 resistors with power of two values?
[20:58:49] <cradek> that would let you set it to exact numbers
[20:58:55] <ds2> limited dynamic range? ;)
[20:59:09] <fenn> log pot
[20:59:10] <ds2> it only provides 24db of adjustment ... ;)
[20:59:26] <fenn> it only goes from 1-6A anyway
[20:59:42] <ds2> but you can get a lot of values from 1-6A
[20:59:57] <ds2> 3.1415926A!!!
[21:00:10] <ds2> okay enough post lunch antics for me
[21:01:48] <jlmjvm> will i be able to home to an index and get a ferror if a motor stalls by adding us digitals?
[21:02:09] <jlmjvm> i know it wont be closed loop
[21:02:32] <ds2> not home
[21:02:55] <jlmjvm> why not?
[21:03:38] <jlmjvm> just curious
[21:04:20] <ds2> home is where you have a known location to reference off of
[21:04:30] <fenn> pay no attention to ds2
[21:04:55] <ds2> unless your entire travel is defined by a single turn....
[21:05:09] <ds2> fenn: is that about homing or the adjustments?
[21:05:22] <fenn> well both :D
[21:05:26] <ds2> :P
[21:05:45] <fenn> i think your question was more about adding encoders to stepper motors than about homing in general, right?
[21:05:52] <ds2> what's your complaint about my homing explanation/assertion?
[21:06:17] <jlmjvm> wanted to know if it would work
[21:06:48] <fenn> i think you could make it work with some HAL magic, but it wouldnt work perfectly "out of the box"
[21:07:43] <jlmjvm> trying to find out if possible before wasting time and money
[21:08:10] <ds2> otherwise, I'd like to hear how do you home with just an encoder
[21:08:27] <fenn> you dont need to home anything to get a ferror
[21:08:37] <fenn> it's all relative
[21:08:55] <fenn> and you can home to a plain old switch, it just wont be very accurate
[21:09:11] <jlmjvm> hit the switch,back off,latch on index?
[21:09:16] <fenn> like +- 0.01" maybe
[21:09:34] <fenn> yes that's normally how you do it
[21:09:39] <jlmjvm> actually im homing to .001
[21:09:54] <fenn> but if you dont have an index you have to rely on the switch alone
[21:10:22] <jlmjvm> want switch,and encoder
[21:10:44] <anonimasu> quoting off the haas site the "VF1 allows us to do this in a single setup...." "Tolerances are ± 0.05 mm on critical dimensions."
[21:10:47] <anonimasu> wtf.
[21:11:13] <fenn> uh, good for them?
[21:11:23] <anonimasu> fenn: good?
[21:11:30] <fenn> * fenn shrugs
[21:11:58] <fenn> if it's a big part maybe
[21:12:06] <anonimasu> it's hinges for a foldable bike..
[21:12:18] <fenn> oh well then that's more than good enough
[21:12:54] <anonimasu> sounds like they are amzed that they can hold 0.05+/-.
[21:13:51] <jlmjvm> thaks for the info,gotta get busy makin some parts
[21:13:59] <fenn> later
[21:15:12] <fenn> what is the point of this current mirror stuff?
[21:17:19] <toast__> anyone have a CMS they like to use for personal webpages
[21:17:31] <toast__> sort of like a news/articles combo
[21:22:21] <ds2> fenn: you refering to my comment about the current mirror?
[21:22:40] <fenn> sorta.. i was just reading about them and i dont see how it could be useful
[21:22:59] <ds2> A current mirror is one way of generating a current source.
[21:23:37] <ds2> it can be setup to multiple the current so on one side you can set it with a high resistor and the other side just mirrors the current source multiplied by a constant; it is quite useful if you have matched transistors
[21:24:48] <fenn> but if you multiply the current then it's an amplifier and not a current mirror
[21:25:32] <ds2> I agree with your terminology but EE text put that all under the current mirror stuff
[21:26:35] <ds2> I guess it has something to do with mirroring the stability of the source whereas an amplifier has more to do with being able to follow the changes (2 sides of the same coin)
[21:33:07] <toast__> toast__ is now known as toastydeath
[21:42:00] <Guest893> I've been tuning some ac servos and have found halscope and hal to be superb in optimising the gains but I'm wondering if anyone can point me in the direction of a document that describes how i should be setting the feedforward gains ff0 and ff1. So far I've just been setting p,i,d
[22:00:37] <cradek> ff0 should almost always be 0. ff1 can correct steady-state error during a cruise (= while not accelerating or decelerating)
[22:02:47] <Guest893> oh ok, I thought that the i term would do that
[22:03:13] <cradek> I builds up over time because it integrates the error, FF1 is proportional to the instantaneous velocity
[22:03:22] <Guest893> no of course the i will correct steady state error at rest but not if the set point is moving
[22:03:55] <Guest893> great - thanks for clearing that up
[22:03:58] <cradek> actually if you have steady error during motion, I will wind up and then you will overshoot the target -- ff1 can help reduce this effect
[22:04:27] <cradek> I like to set ff1 with I=0 and then add the I back in
[22:04:47] <cradek> otherwise it's hard to see the actual error during cruise because I corrects it (after a while)
[22:04:52] <Guest893> that's exactly what I have - not a lot but enough to make me want to correct it - I'll have a play
[22:04:59] <cradek> have fun
[22:05:58] <cradek> ff1 numbers are really small - it's sensitive
[22:06:15] <cradek> you should be able to zero out the error during cruise and then everything will work better
[22:06:51] <cradek> there is also ff2, which is proportional to the instantaneous acceleration (you may have to add ff2 to your ini and hal files)
[22:06:58] <Guest893> how small are we talking? to give you an idea I've got D=0.4, P=11 and I=0.05
[22:07:15] <cradek> maybe .1 or less
[22:07:31] <cradek> I bet you will be able to turn up I a lot afterward
[22:07:57] <Guest893> ok thanks
[22:08:37] <Guest893> this is the first time I've ever tuned drives that are configured for torque cmd as opposed to velocity
[22:08:50] <cradek> ah I see
[22:09:10] <Guest893> normally i would have expected my d term to be much higher than my p but with this setup it just brings on ringing
[22:09:13] <cradek> have to run, I'll be back later, good luck
[22:09:28] <cradek> yeah my experience with emc is that D is small like you have it
[22:09:32] <Guest893> ok - thanks for the info
[22:09:35] <cradek> much less than P/I
[22:12:25] <toastydeath> pew pew pew
[22:18:23] <toastydeath> i wonder if i could get projects from like, home shop communities
[22:18:28] <toastydeath> if i started a home business
[22:18:56] <toastydeath> to sort of get situated
[22:21:16] <ds2> if you find sources like that, please share!
[22:21:28] <toastydeath> well like
[22:21:34] <toastydeath> i'm trying to get a 10 year plan
[22:21:37] <toastydeath> for school/work
[22:22:03] <toastydeath> and my thought was that as I get settled in a place, start investing in some of the precision gear necessary to do prototyping
[22:22:13] <toastydeath> and instead of botching up some real jobs, ask the shop community what they need
[22:22:23] <toastydeath> and for materials/etc, make a couple things to get used to the equipment
[22:22:28] <toastydeath> 127 tooth gears, etc
[22:22:32] <fenn> you should talk to the communist party, they're good at 10 year plans
[22:22:58] <toastydeath> hahahaha
[22:23:16] <fenn> look at littlemachineshop.com for ideas
[22:23:42] <toastydeath> well, more like, oddball stuff
[22:24:00] <toastydeath> i don't know if home shop people have many oddball needs
[22:24:03] <fenn> who would want oddball stuff?
[22:24:10] <toastydeath> people willing to pay 30k a part
[22:24:15] <fenn> pff
[22:24:23] <toastydeath> but they won't hand you the part unless they know you won't scrap it
[22:24:25] <fenn> didnt you just say "home shop people"
[22:24:55] <toastydeath> you didn't read
[22:24:58] <toastydeath> re-read
[22:25:34] <toastydeath> i'd like to take on oddball precision stuff from home shop guys in preperation for doing real work
[22:25:43] <toastydeath> but i don't know if they have anything that would be suitable
[22:25:48] <toastydeath> somebody's bound to
[22:26:00] <fenn> like, subcontracting for people?
[22:26:05] <toastydeath> yeah
[22:26:17] <fenn> what's this about 127 tooth gears then?
[22:26:28] <fenn> that's not oddball stuff at all
[22:26:36] <toastydeath> well it's something they need frequently
[22:26:43] <toastydeath> and it's got enough stuff on it that it would make it worthwhile as practice
[22:27:59] <toastydeath> a 127 tooth master divider maybe
[22:28:21] <toastydeath> i'll probably just be broke and have to sell anything
[22:28:33] <toastydeath> *everything
[22:28:34] <fenn> yep
[22:28:50] <fenn> go where the money is
[22:28:54] <toastydeath> i'm pretty sure i'll be able to get real work though
[22:29:43] <toastydeath> there's an influx of businesses who need things done accurately but can't find people able to do it
[22:29:57] <toastydeath> maybe I, too, can be one of those people who aren't able to do it
[22:32:03] <fenn> you should sell universal measuring machines on ebay
[22:33:48] <toastydeath> Moore Tool would buy them and sell them to their customers
[22:34:03] <fenn> exactky
[22:35:54] <toastydeath> i'm thinking a few manual machines, a jig borer, jig grinder, and a UMM
[22:35:59] <toastydeath> and i'd be able to get local business
[22:36:10] <toastydeath> at worst.
[22:36:17] <fenn> is there any local business/
[22:36:22] <toastydeath> a whole tone
[22:36:23] <fenn> wherever you are
[22:36:23] <toastydeath> *Ton
[22:36:25] <toastydeath> yeah
[22:36:33] <toastydeath> delaware/northeast
[22:36:47] <toastydeath> i pass machine shops just driving around
[22:37:44] <fenn> well, stop in and give them your business card
[22:37:47] <toastydeath> yar
[22:37:58] <toastydeath> college physics departments, etc
[22:38:06] <toastydeath> local shops, local engineering firms
[22:38:52] <toastydeath> a man, a plan, a canal
[22:49:33] <skunkworks> http://www.electronicsam.com/images/engraver/emc2axis.JPG
[22:50:12] <skunkworks> yes - that is my foot
[22:52:23] <Ziegler> nice skunkworks
[22:52:48] <Ziegler> what sort of bit?
[22:52:57] <skunkworks> engraver bit - dull I think
[22:53:27] <skunkworks> plus - I ran it at whatever the splash screen is set at - I think it is 60ipm
[22:53:44] <skunkworks> cut pretty good though
[22:54:08] <Ziegler> looks like it
[23:02:11] <skunkworks> I know how much jepler likes to see the emc2 axis splash screen cut into things. :)
[23:06:43] <skunkworks> even if it is fake woodgrain sign stock
[23:19:25] <archivist> engrave a toenail next
[23:37:56] <skunkworks> eww
[23:38:40] <toastydeath> lol
[23:39:05] <archivist> that would be putting faith in machinery!
[23:40:37] <toastydeath> hope you don't have a crash.
[23:43:53] <jmkasunich> is the guy who was asking about homing a stepper machine to index still here?
[23:44:25] <jmkasunich> jlmjvm I guess it was, and he's gone....
[23:44:42] <jmkasunich> that was added recently (2.2, not 2.1.x)
[23:45:14] <jmkasunich> you can home to index without a switch - you need to jog to within one screw turn of the proper location, then hit home and it will find the index
[23:45:49] <jmkasunich> one screw turn is enough that even a Sharpie mark on the side of the machine can be used
[23:46:11] <jmkasunich> switches are better of course
[23:46:16] <toastydeath> a+ switches
[23:50:35] <jmkasunich> switch but no index = convenient but not terribly accurate
[23:50:47] <jmkasunich> index but no switch = accurate but not convenient
[23:50:57] <jmkasunich> switch and index = accurate and convenient
[23:54:25] <toastydeath> disco!
[23:55:06] <jmkasunich> * jmkasunich wonders what toastydeath has running around in his brain cells
[23:55:24] <toastydeath> crazy tacos.
[23:57:40] <toastydeath> now, at work, begins the long and tedious process of seeing if all my parts came out flat
[23:58:37] <toastydeath> i need to bring books to read
[23:59:39] <ds2> but homing with just an indexing is inviting aliasing issues
[23:59:57] <ds2> along with backlash if any
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}