Back
[00:01:25] <Loetmichel> andypugh: try mini-xlr
[00:01:43] <Loetmichel> or the hirose stuff
[00:02:25] <andypugh> Even Lemo 00 isn't quite small enough.
[00:03:35] -!-
theorb [
[email protected]] has joined #emc
[00:03:57] -!-
theorbtwo has quit [Read error: Operation timed out]
[00:04:09] theorb is now known as
theorbtwo
[00:07:31] <andypugh> mini-displayport might work
[00:12:12] <andypugh> 20x 0.5A pins... I need 9 data and 3x5A. So, not quite there for the power connection.
[00:15:25] -!-
sumpfralle [
[email protected]] has joined #emc
[00:25:13] -!-
ve7it has quit [Remote host closed the connection]
[00:25:37] <jdhNC> that tiny and 3 5A?
[00:26:43] -!-
A2Sheds has quit [Quit: puff of smoke]
[00:28:16] -!-
ve7it [
[email protected]] has joined #emc
[00:28:18] <andypugh> 9 way D-sub is 7A per pin. And they could pack tighhter
[00:29:03] <jdhNC> how about a mini 9 DIN?
[00:29:14] <jdhNC> too tall I guess
[00:30:00] <andypugh> I should have thought about this earlier in the design process, obviously.
[00:30:10] -!-
Valen [
[email protected]] has joined #emc
[00:30:18] -!-
A2Sheds [A2Sheds!~ly@unaffiliated/l84supper] has joined #emc
[00:35:42] -!-
H264 [
[email protected]] has joined #emc
[00:37:36] -!-
tlab0 has quit [Quit: Leaving]
[00:37:51] -!-
factor [
[email protected]] has joined #emc
[00:38:05] -!-
memleak [memleak!~memleak@unaffiliated/memleak] has joined #emc
[00:49:47] -!-
maximilian_h [
[email protected]] has joined #emc
[00:49:59] -!-
maximilian_h [
[email protected]] has parted #emc
[00:56:18] -!-
memleak has quit [Quit: Leaving]
[01:01:33] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[01:03:08] -!-
PCW has quit [Quit: ChatZilla 0.9.88 [Firefox 3.6.13/20101203075014]]
[01:23:42] -!-
mshaver [mshaver!~mshaver@173-167-237-41-ip-static.hfc.comcastbusiness.net] has parted #emc
[01:26:09] -!-
Nick001-Shop has quit []
[01:36:26] -!-
rob__H [
[email protected]] has joined #emc
[01:39:04] -!-
Tom_L has quit []
[01:40:05] -!-
rob_h has quit [Ping timeout: 260 seconds]
[01:59:52] -!-
zlog has quit [Remote host closed the connection]
[01:59:54] -!-
Tom_itx has quit []
[02:01:21] -!-
Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #emc
[02:01:26] -!-
zlog [
[email protected]] has joined #emc
[02:05:16] -!-
rob__H has quit [Ping timeout: 240 seconds]
[02:06:38] -!-
sumpfralle has quit [Ping timeout: 240 seconds]
[02:12:05] -!-
rob_h [
[email protected]] has joined #emc
[02:21:48] -!-
sumpfralle [
[email protected]] has joined #emc
[02:21:59] -!-
LawrenceSeattle has quit [Quit: LawrenceSeattle]
[02:22:48] -!-
rob_h has quit [Quit: Leaving]
[02:47:39] -!-
stormlight has quit [Quit: stormlight]
[02:48:17] -!-
Nick001 [
[email protected]] has joined #emc
[02:59:02] -!-
stormlight [
[email protected]] has joined #emc
[03:02:01] -!-
clytle374 [
[email protected]] has joined #emc
[03:23:33] -!-
Tom_L [
[email protected]] has joined #emc
[03:23:59] Tom_L is now known as
Guest49836
[03:24:12] -!-
Guest49836 has quit [Client Quit]
[03:31:11] <Ekkeri> http://www.linuxcnc.org/docs/devel/html/man/man9/hostmot2.9.html#3ppwmgen "Each instance allocates 7 output and one input pins on the Mesa card connectors."
[03:31:44] <Ekkeri> Can I use just one PWM A and enable?
[03:32:39] <Ekkeri> that three phase PWM seems to be quite a new animal?
[03:33:10] -!-
Calyp has quit [Quit: Leaving]
[03:35:26] <clytle374> I think there is a single pwm aviable
[03:36:12] <clytle374> http://www.linuxcnc.org/docs/devel/html/man/man9/hostmot2.9.html#pwmgen
[03:37:46] <Ekkeri> clytle374, but it's not 0 at 50% and needs some offset thing
[03:39:27] -!-
stormlight has quit [Quit: stormlight]
[03:39:34] <Ekkeri> not sure about that pwmgen 4 tho
[03:39:52] <Ekkeri> it says "for locked antiphase"
[03:39:59] <Ekkeri> and only one PWM-output
[03:44:15] <clytle374> sorry, I don't know
[03:47:32] <Ekkeri> http://linuxcnc.org/index.php/english/component/kunena/?func=view&catid=24&id=15161
[03:47:42] <andypugh> Ekkeri: Can you say what you want to do?
[03:48:07] <andypugh> Ah, OK.
[03:48:23] <andypugh> back in a bit
[03:48:31] <Ekkeri> I have those VSD-drivers too
[03:51:37] <Ekkeri> "With locked anti-phase you will need to insert an offset component (COMP) in the HAL file between the PID output and the PWM value pin"
[03:52:17] <Ekkeri> but like pcw said that isn't really a safe option
[03:53:09] <Ekkeri> from that 3ppwmgen: (bit input) enable: When high the PWM is enabled as long as the fault bit is not set by the external fault input pin. When low the PWM is disabled, with both high- side and low-side drivers low. This is not the same as 0 output (50% duty cycle on both sets of pins) or negative full scale (where the low side drivers are "on" 100% of the time)
[03:53:52] <andypugh> The 7i39 bitfiles might be what you want, they only steal 3 pins I think. They want to make an encoder, but you can over-ride those seperately
[03:55:05] <Ekkeri> well I need encoders as well
[03:55:12] <andypugh> Ekkeri: Yes, I am not entirely sure what that means, and I wrote it.
[03:55:16] <Ekkeri> :P
[03:56:50] <andypugh> I think that you are safe as long as the PWM is enabled, but you need to make sure you configure such that when the PWm is disabled, so is the drive. That's just HAL (virtual) wirin though.
[03:57:22] <Ekkeri> ok
[03:57:37] <Ekkeri> but should I use pwmgen 4 or 3ppwmgen?
[03:59:29] <andypugh> 3p is nearer to what you want for 50% offset, but it does waste some pins. But then you probably have spares. Try loading a 7i39 bitfile and see how it looks
[04:00:01] <Ekkeri> how it wastes them?
[04:00:23] <Ekkeri> I don't have too many pwm outputs
[04:02:24] -!-
stormlight [
[email protected]] has joined #emc
[04:02:49] -!-
capricorn_one [
[email protected]] has joined #emc
[04:06:37] <andypugh> A 3pwm always makes 3 pwm pins. But I have just remembered that they are individually settable.
[04:06:57] -!-
stormlight has quit [Ping timeout: 244 seconds]
[04:07:08] <andypugh> So you could probably make 1x3pwm and 3x encoders and not be too badly off
[04:07:40] <andypugh> I assume you have Mesa hardware?
[04:08:18] <Ekkeri> yup
[04:08:37] <Ekkeri> 5i20 & 7i52
[04:09:19] <Ekkeri> (not S, yet at least.. I was thinking to mod it to almost S, but it seemed that it's not needed)
[04:11:10] <Ekkeri> that 3pwm has 6 output pins for pwm
[04:16:11] -!-
FinboySlick [
[email protected]] has joined #emc
[04:16:52] <Ekkeri> hmmp.. pins: (float input) A, B & C-value, +/- "scale".. does it mean if I use only high side drive, I will get only + "scale"?
[04:20:18] -!-
ve7it has quit [Remote host closed the connection]
[04:22:11] -!-
Aero-Tec has quit [Ping timeout: 252 seconds]
[04:30:49] <andypugh> 7i39 3pwm is centre-biased I think, a 7i39 bitfile only makes a single channel for each phase, where negative is PWM <50% and positive is PWM > 50%
[04:31:45] <andypugh> You don't have to have a 7i39 to use a 7i39 bitfile
[04:33:13] <Ekkeri> ok, I will try that when I have my computer back in action
[04:35:06] <Ekkeri> can I use 7i52 rs422 rx as a diff input (for limit switch)
[04:37:04] <Ekkeri> I was thinking to use a hall sensor and a rs422 transmitter in the other end
[04:39:13] <Ekkeri> and maybe a second hall without rs422 for backup, since I don't have enough those rs422 inputs, IF I can use them..
[04:43:59] <Ekkeri> any input is welcome, I will have to get some sleep ->
[04:47:51] -!-
theorbtwo has quit [Ping timeout: 252 seconds]
[04:52:14] -!-
theorbtwo [
[email protected]] has joined #emc
[05:02:43] -!-
Jim_ has quit [Remote host closed the connection]
[05:17:51] -!-
automata [
[email protected]] has joined #emc
[05:22:48] -!-
garage_seb [
[email protected]] has joined #emc
[05:24:58] -!-
capricorn_one has quit [Read error: Operation timed out]
[05:26:57] -!-
stormlight [
[email protected]] has joined #emc
[05:27:55] -!-
Aero-Tec [
[email protected]] has joined #emc
[05:37:18] <andypugh> Ekkeri: Why do you need differential for a limit switch? Mine are wired direct to the 7i43 FPGA card. I don't have _any_ daughter cards.
[05:37:37] <FinboySlick> andypugh: Aren't you getting up early for a weekend?
[05:38:01] <andypugh> I could stay up, at this point, it's 0530
[05:38:54] <FinboySlick> andypugh: Heh, darn, that was my alternative guess but I figured you're too old to pull all nighters ;)
[05:39:15] <andypugh> Old yes, but single and insomniac
[05:39:32] <FinboySlick> All attributes of genius.
[05:43:03] -!-
capricorn_one [
[email protected]] has joined #emc
[05:44:22] <clytle374> Maybe he's in RT and can't enter a sleep state.
[05:45:11] <andypugh> You might be right, but it' time to try.
[05:45:15] <andypugh> Night all!
[05:45:21] -!-
andypugh has quit [Quit: andypugh]
[05:45:41] <FinboySlick> RT?
[05:46:11] <clytle374> real time
[05:46:24] <FinboySlick> Oh, clever.
[05:46:32] <clytle374> I'm not in real time and can't sleep.
[05:46:47] <clytle374> But, my hardware is good since the Ubuntu cd works
[05:46:51] <FinboySlick> clytle374: You might have to downgrade to dodge the PM bug ;)
[05:47:35] <clytle374> A for real bug?
[05:48:49] <FinboySlick> Not EMC related. There's the power management bug in latest kernel that's been lasting for a while now... I'm not sure it's completely fixed yet.
[05:49:11] <FinboySlick> geek humour has a tendency to grow obscure fast I guess
[05:50:02] <SWPadnos> the EMC liveCD doesn't use the latest kernel (assuming you're talking about a 3.x kernel version)
[05:50:33] <FinboySlick> SWPadnos: I know. I was continuing the joke about kernel states and insomnia.
[05:50:39] <SWPadnos> ah
[05:50:45] <SWPadnos> see, it must be geting late :)
[05:50:48] <SWPadnos> +t
[05:53:50] <clytle374> ah, makes sense. I'd love to find a bug at this point.
[05:54:11] <clytle374> The Ubuntu disk just made me more stubborn
[05:54:12] <Aero-Tec> hello
[05:54:52] <Aero-Tec> the dual PP port Mesa Electronics card
[05:55:01] <Aero-Tec> is it any good?
[05:55:29] <Aero-Tec> also what is the card part number I should look up?
[05:56:15] <FinboySlick> Aero-Tec: I don't think they're actual parallel ports, they're just pin-compatible.
[05:56:23] <SWPadnos> 5i25 maybe?
[05:56:51] <Aero-Tec> thet were coming out with a new board
[05:56:52] <SWPadnos> right - it's an FPGA card that has connectors that pretend to look like parallel ports
[05:57:04] <Aero-Tec> cool
[05:57:10] <Aero-Tec> any good?
[05:57:46] <Aero-Tec> it was suppose to be around $80
[05:58:13] <FinboySlick> Aero-Tec: Well, they'll kick a parallel port's buttocks.
[05:58:26] <Aero-Tec> lol
[05:58:42] <Aero-Tec> I like the sound of that
[05:59:07] <FinboySlick> Aero-Tec: Depends on how fast you run your machine and what performance you're getting out of your PP already.
[05:59:14] <SWPadnos> it's about the same price as a 7i43, but has less I/O (34 pins instead of 48), but they're not the same thing
[05:59:41] <FinboySlick> Aero-Tec: I'm assuming that your setup is running off a PP already.
[06:00:17] <Aero-Tec> yes to PP
[06:01:01] <Aero-Tec> Mesa Electronics said they were coming out with a new IO board
[06:01:29] <Aero-Tec> that was a few months ago
[06:01:52] <SWPadnos> it's on their website and price list ...
[06:01:59] <SWPadnos> I don't know if that means you can buy one :)
[06:03:21] <FinboySlick> Aero-Tec: I'm going off what I understood when I was about to buy one (I'm still planning to, just got sidetracked), but the main difference with a PP is that the mesa card will generate the pulse rates on its own and is therefore a lot less sensitive to jitter issues.
[06:04:52] <SWPadnos> it's an FPGA card like their others, but with parallel port connectors instead of the "standard" 50-pin headers that the other cards have
[06:05:26] <SWPadnos> and therefore it has less I/O on its two connectors, because a parallel port has only 17 I/O pins instead of the 24 on the 50-pin connectors
[06:07:34] <Aero-Tec> I understood it to be a card that plugged into the computers MB and had 2 PP connectors on it
[06:07:49] <Aero-Tec> made IO very easy
[06:08:29] <Aero-Tec> I could have misunderstood what they said they were making
[06:08:42] <SWPadnos> the photo makes it look like it has one parallel port connector and one header that you could plug another one into
[06:09:01] <Aero-Tec> is the FPGA boards new?
[06:09:07] <SWPadnos> ?
[06:09:36] <Aero-Tec> this board would have come out in the last few months
[06:09:55] <SWPadnos> have you looked at their website?
[06:09:59] <Aero-Tec> they were chatting it up
[06:10:01] <Aero-Tec> yes
[06:10:05] <Aero-Tec> there now
[06:10:07] <SWPadnos> ok
[06:10:37] <SWPadnos> this board looks new (because I haven't heard of it before), but they have had FPGA boards that work with EMC for several years
[06:10:40] <Aero-Tec> find it not that nice or easy
[06:10:41] <automata> SWPandos: I bought a 5i25.. But have not had time to run it yet!!
[06:11:27] <Aero-Tec> if you know the product line I guess it may be OK
[06:11:58] <SWPadnos> I have deployed several systems using Mesa cards (not CNC machines, but they did use HAL)
[06:12:12] <Aero-Tec> but to someone how has know idea where to start it is a little hard to hind what your wanting on their web site
[06:12:55] <automata> The 5i25 just looks like a parallel port!! but it is indeed a SuperPort!!
[06:13:00] <SWPadnos> any of their AnythingIO cards will work. I wouldn't expect it to drop in and directly replace a parallel port though, the configuration will be completely different
[06:13:55] <automata> for the 5i25 you will have to program the configuration before hand and reboot the machine once for that configuration to take effect
[06:14:53] <SWPadnos> I would assume that's only if you want it to be active at powerup, and you program it into an EEPROM
[06:15:17] <SWPadnos> you should be able to load a configuration into the FPGA when you start EMC, the same as it's done with the other cards.
[06:15:36] <SWPadnos> I could be wrong about that of course, remember that I only heard of this particular card this evening :)
[06:19:56] <automata> According to my interpretation of what PCW said, the programmed configuration does not take effect till a reboot.
[06:20:26] <Aero-Tec> the 5i25 looks like the beast
[06:20:31] <automata> SWPandos: What you say is true for the remaining line of the AnythingIO cards
[06:20:32] <Aero-Tec> is it new?
[06:21:00] <SWPadnos> that would certainly be true if it's an EEPROM-based configuration, since the programming step only puts the data in the EEPROM, which is then loaded by the FPGA at the next bootup
[06:21:04] <automata> The difference between 5i25 and the rest is that the PCI controller is also operated of the same FPGA
[06:21:11] <Aero-Tec> looks like what was described
[06:21:19] <SWPadnos> I'm just wondering if there's a way to do it like the other cards also
[06:21:24] <SWPadnos> ah
[06:21:35] <SWPadnos> in that case there is likely only the one way to do it :)
[06:22:07] <Aero-Tec> it looks like it is a super PP
[06:22:29] <automata> I am guessing that was the way to reduct the cost of the PCI card to near the parallel port cards
[06:22:35] <Aero-Tec> was wanting to hear from some others that have used it
[06:22:36] <SWPadnos> yep
[06:23:06] <Aero-Tec> last I hard of it it was so new they had not given it a number yet
[06:26:51] <SWPadnos> well, good night
[06:29:24] <Aero-Tec> good night
[06:30:51] <Aero-Tec> would like to hear from someone that has used the 5i25 board in their machine and hear about how well it worked for them and if there is anything one needs to know about
[06:31:03] <Aero-Tec> I to have to hit the hey
[06:31:08] <Aero-Tec> night
[06:34:13] -!-
LawrenceSeattle [
[email protected]] has joined #emc
[06:47:42] <clytle374> I have solved the watchdog biting problem that's plagued my soul for 4 days
[06:47:49] <clytle374> It wasn't my kernel
[06:47:52] <clytle374> Or rtai
[06:47:57] <clytle374> It's 2.5
[06:48:33] <clytle374> 2.4 works
[06:52:29] <clytle374> Not sure if you want to know, but I bet it comes up again ;)
[06:56:01] -!-
SanNas [SanNas!~nadie@unaffiliated/sannas] has joined #emc
[06:56:18] -!-
SanNas [SanNas!~nadie@unaffiliated/sannas] has parted #emc
[07:16:42] <clytle374> g night
[07:16:45] -!-
clytle374 has quit [Quit: Leaving]
[07:47:02] -!-
capricorn_one has quit [Remote host closed the connection]
[07:56:13] -!-
FinboySlick has quit [Quit: Leaving.]
[08:25:02] -!-
automata has quit [Read error: Connection reset by peer]
[08:40:07] -!-
automata [
[email protected]] has joined #emc
[08:41:45] -!-
psha [
[email protected]] has joined #emc
[08:43:26] -!-
Mjolinor [Mjolinor!~Mjolinor@cpc1-burn3-0-0-cust572.10-1.cable.virginmedia.com] has joined #emc
[09:06:34] -!-
garage_seb has quit [Remote host closed the connection]
[09:26:38] -!-
sumpfralle has quit [Ping timeout: 240 seconds]
[09:39:05] -!-
psha has quit [Quit: leaving]
[10:20:00] -!-
rob_h [
[email protected]] has joined #emc
[10:50:36] <automata> Hi
[10:51:04] <automata> has anyone use a control techniques SK commander series drive?
[10:51:17] <automata> does it support PWM speed reference?
[11:23:35] <Loetmichel> moin
[11:50:13] -!-
KimK has quit [Quit: Leaving]
[11:51:23] -!-
Loetmichel has quit [Ping timeout: 240 seconds]
[11:55:45] -!-
Loetmichel [
[email protected]] has joined #emc
[11:55:45] -!-
factor has quit [Read error: Connection reset by peer]
[11:56:57] -!-
Loetmichel has quit [Client Quit]
[12:13:41] -!-
factor [
[email protected]] has joined #emc
[12:24:06] -!-
stormlight has quit [Quit: stormlight]
[12:24:25] -!-
KimK [
[email protected]] has joined #emc
[12:26:54] -!-
martinst_ [
[email protected]] has joined #emc
[12:49:27] <automata> Hi has anyone use a control techniques SK commander series drive?
[12:50:21] <jthornton> seems to be an echo in here
[12:51:15] <archivist> has anyone read the manual for a control techniques SK commander series drive
[12:53:28] -!-
Gast784 [
[email protected]] has joined #emc
[12:55:11] -!-
Gast784 [
[email protected]] has parted #emc
[13:22:58] <automata> I have read the manual, but that information is a little hard to discern.
[13:23:47] <automata> I have also mailed the local Emerson Tech for more information.
[13:25:39] <automata> Also, has somebody tried monitor the output frequency to control the motion.spindle-at-speed pin?
[13:26:31] <automata> can a Mesa 7i43 be used to monitor the output frequency from the VFD?
[13:29:43] <automata> can the encoder module on the MESA card be used for frequency measurement?
[13:31:37] -!-
syyl [
[email protected]] has joined #emc
[13:32:15] <archivist> does it have a 0-10v in, if yes then it is simple to convert pwm to a voltage with a filter
[13:36:05] <A2Sheds> 7i43 is digital only, but yes frequency to voltage conversion by method of choice will work with a ADC + 7i43
[13:47:00] <Ekkeri> I think encoder would be nicer feedback signal?
[13:49:38] -!-
martinst_ has quit [Ping timeout: 240 seconds]
[13:49:54] <Ekkeri> my vfd can output its freq also, but I don't know why I would need it (or how to connect it :)
[13:56:02] -!-
n2diy has quit [Ping timeout: 255 seconds]
[14:06:02] <automata> I would rather not use a filter. The control techniques drive has a feature called "frequency input".
[14:07:41] <automata> I am hoping that I can use this as in input frequency (with some drive side internal scaling). This will avoid analog conversion all-together.
[14:08:43] -!-
n2diy [
[email protected]] has joined #emc
[14:09:11] <Ekkeri> I will try to use pwm input too, but my vfd needs 10V signal
[14:09:42] <Ekkeri> so I need to scale it a little bit
[14:11:17] <Ekkeri> there were internal scaler, but it was for analog input sn I would need pwm-analog conversion
[14:12:45] -!-
Valen has quit [Quit: Leaving.]
[14:24:04] <automata> the encoder module on the 7i43 can be used as a step and direction counter
[14:24:54] <automata> Then we can tie pin B of the encoder (direction) to High and count the pulses on pin A
[14:25:06] -!-
A2Sheds has quit [*.net *.split]
[14:25:07] -!-
kanzure has quit [*.net *.split]
[14:25:42] <Ekkeri> I dont have any free encoder inputs :/
[14:25:43] -!-
A2Sheds [A2Sheds!~ly@unaffiliated/l84supper] has joined #emc
[14:25:43] -!-
kanzure [
[email protected]] has joined #emc
[14:26:09] <Ekkeri> xyza + motor + spindle
[14:26:10] <automata> The spindle velocity can then be directly estimated from the encoder velocity output
[14:26:22] <automata> motor?
[14:26:43] <A2Sheds> sure
[14:26:56] <A2Sheds> estimated
[14:27:06] <automata> I am going to try this config out for the encoder!!
[14:27:13] <automata> A2Sheds: sure estimated
[14:27:25] <A2Sheds> you have the FPGA there with extra gates
[14:27:36] <Ekkeri> i have v-belt between motor and spindle and i will like to calculate the slippage
[14:28:19] <automata> Yes the 400K gate FPGA on the 7i43-4 is actually under-utilized
[14:29:03] <automata> But It does have the encoder input and it also has the step-gen velocity mode output which I am currently not using
[14:29:17] <automata> gtg...
[14:29:39] <A2Sheds> the counters should go to at least 10MHz
[14:29:47] <A2Sheds> IIRC
[14:30:48] -!-
IchGucksLive [
[email protected]] has joined #emc
[14:31:21] <IchGucksLive> hi all i try to clean my system ubuntu 10.04
[14:31:55] <IchGucksLive> there is after apt-get update - upgrade and reinstall the new pycam a message
[14:32:51] <IchGucksLive> The following packages were automatically installed and are no longer required
[14:33:14] <IchGucksLive> and a bunch of packets around 30
[14:33:27] <IchGucksLive> Use 'apt-get autoremove' to remove them.
[14:33:36] <IchGucksLive> what shoudt i do
[14:37:44] -!-
automata has quit [Ping timeout: 240 seconds]
[14:58:03] -!-
packrat has quit [Ping timeout: 252 seconds]
[14:58:18] -!-
packrat [
[email protected]] has joined #emc
[15:07:57] <Ekkeri> hmm, I'm at the beginning of the learning curve and I'm trying to decide what I should study next when I have famaliarized myself with hal & hostmot2 (mesa hw).. what do you think? pyVCP or gladeVCP? is ladder logic needed at all? I'm not very fond to that (nor relays) :)
[15:09:12] <jthornton> ladder is useful if you have a tool changer
[15:09:32] <jthornton> pyVCP is pretty easy to do and gladeVCP is more powerful
[15:10:06] <Ekkeri> luckily I don't have, but there seems to be some modbus support in ladders
[15:16:30] <Ekkeri> I think I will go with the gladeVCP and skip the py
[15:17:27] -!-
theorb [
[email protected]] has joined #emc
[15:17:29] -!-
theorbtwo has quit [Ping timeout: 240 seconds]
[15:18:25] theorb is now known as
theorbtwo
[15:19:25] <IchGucksLive> does classic ladder from sourcforce come with emc is this the same
http://sourceforge.net/projects/classicladder/
[15:21:02] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[15:27:54] -!-
Tom_L has quit []
[15:31:21] -!-
martinst_ [
[email protected]] has joined #emc
[15:37:48] <IchGucksLive> we shoudt considder the ngc start file 2.4 with 2.6pre running
[15:41:26] -!-
theorbtwo has quit [Remote host closed the connection]
[15:41:27] <jthornton> sure looks the same
[15:41:41] -!-
theorbtwo [
[email protected]] has joined #emc
[15:42:53] <jthornton> http://linuxcnc.org/docview/2.5/html/ladder/classic_ladder.html#_introduction
[15:48:11] -!-
clytle374 [
[email protected]] has joined #emc
[15:49:05] -!-
Tom_L [Tom_L!~Tl@unaffiliated/toml/x-013812] has joined #emc
[15:49:59] -!-
Tom_itx has quit [Disconnected by services]
[15:50:04] Tom_L is now known as
Tom_itx
[16:07:57] <Mjolinor> does the encoder part of hal use the index pulse for RPM? and does it take leading edge, falling edge , both or level on the quadrature signals
[16:10:29] -!-
zlog has quit [Ping timeout: 248 seconds]
[16:11:44] -!-
Tom_itx has quit [Ping timeout: 240 seconds]
[16:12:38] -!-
theorbtwo has quit [Ping timeout: 268 seconds]
[16:13:22] -!-
IchGucksLive has quit [Quit: ChatZilla 0.9.87 [Firefox 9.0.1/20111221214946]]
[16:13:57] -!-
Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #emc
[16:14:10] -!-
zlog [
[email protected]] has joined #emc
[16:16:56] -!-
theorbtwo [
[email protected]] has joined #emc
[16:37:17] <clytle374> Sorry, but I gotta brag about these numbers.
http://i.imgur.com/9Qxzf.png
[16:38:05] <clytle374> glxgears, compiling software, file transfers for 10 hours
[16:38:54] <Ekkeri> clytle374, that's nice, what kind of hw? :)
[16:39:25] -!-
WalterN [
[email protected]] has joined #emc
[16:39:33] <clytle374> atom Intel D945GCLF2
[16:44:03] <mozmck> not bad! looks like you are running xfce. Is that xubuntu?
[16:44:34] <clytle374> gentoo
[16:44:50] <mozmck> I see. What kernel version?
[16:45:20] <clytle374> 2.6.35.9 with cvs vulcano rtai
[16:45:29] <mozmck> Ok.
[16:45:43] <clytle374> it is emc 2.4, 2.5 won't run
[16:45:54] <mozmck> Why?
[16:46:08] <Ekkeri> nothing to brag about then! ;)
[16:46:21] <clytle374> The watchdog bites, fought it for a week thinking it was rtai
[16:46:26] <clytle374> but 2.4 works
[16:47:11] <mozmck> what watchdog, in emc?
[16:48:49] <Ekkeri> yeah?
[16:49:01] <clytle374> I would get a watchdog has bit in dmesg while initializing the 5i20
[16:49:13] -!-
servos4ever [
[email protected]] has joined #emc
[16:49:19] <clytle374> I tired about 5 diffrent combos of kern/rtai
[16:50:11] <clytle374> I bet it comes up again with a newer kernel/rtai
[16:50:17] <mozmck> hmm, not familiar with that. Sounds like something with hostmot maybe? I've never used hostmot though.
[16:51:04] <clytle374> 2.4 just did it
[16:51:16] <mozmck> Could be. I'm going to try and get a kernel compiled for 12.04, but I'm not sure when there will be an rtai patch for it.
[16:51:28] <clytle374> oops, I forgot to run mknod /dev/RTAI_SHM c 10, 254;
[16:52:01] <mozmck> Ubuntu 12.04 that is. it uses kernel version 3.2 and the latest rtai patch is 2.6.38.8
[16:52:17] -!-
andypugh [andypugh!~andy2@cpc2-basl1-0-0-cust492.basl.cable.virginmedia.com] has joined #emc
[16:52:31] <clytle374> So I would guess that something between hostmot2 and RTAI_SHM changed between 2.4 and 2.5
[16:53:35] <mozmck> Could be.
[16:54:01] <clytle374> rtai patches are way behind, they did realease the first updates in 10 months this week
[16:54:04] <clytle374> so there is hope
[16:56:50] <mozmck> I saw that. Of course they use the Adeos patches and modify them, and the latest x86 patch on adeos is 2.6.38.8
[16:58:18] <clytle374> Why is there magna and vulcano?
[16:59:21] -!-
martinst_ has quit [Ping timeout: 252 seconds]
[16:59:22] <mozmck> I don't remember for sure, but I think magma is where the main development is, and vulcano is where the next release code goes.
[16:59:49] <clytle374> and they are moded Adeos patches?
[17:00:42] <mozmck> the kernel patches are. I don't know exactly what they do to them. Xenomai uses the adeos patches as-is I believe.
[17:04:07] <clytle374> it's all very confusing.
[17:05:59] <A2Sheds> clytle374: memleak will be on later, he can walk you though it
[17:07:10] <clytle374> thanks, hoping this will shed some light as to what is going wrong.
[17:08:14] <Aero-Tec> has anyone used the 5i25 board yet?
[17:08:22] <Aero-Tec> looking for feedback
[17:09:24] <Aero-Tec> wanting to know if it is better then 2 PP
[17:10:03] <jthornton> Aero-Tec: yea with a 7i76
[17:10:22] <Aero-Tec> I am running 1 PP now but want to add a PP, but thought maybe upgrading to the 5i25 board would be better
[17:10:36] <jthornton> PP?
[17:10:55] <Aero-Tec> Parallel port
[17:11:10] <jthornton> oh, light years ahead of a parallel port
[17:11:49] <Aero-Tec> so your running it now
[17:12:00] <andypugh> You can't do megahertz step rates with a parallel port.
[17:12:01] <jthornton> neat clean installation, lots of I/O, an encoder input
[17:12:20] <Aero-Tec> I was thinking the same, 5i25 and the 7i76
[17:12:26] <jthornton> yea, I ran it to test now I'm changing my plasma cutter to it
[17:12:54] <jthornton> I like it so much I have a 5i25/7i77 on order for the BP knee mill conversion
[17:13:06] <Aero-Tec> so it is hard to setup and configure?
[17:13:11] <jthornton> no
[17:13:24] <andypugh> Aero-Tec: You can configure it to look exactly like a dual parport, and connect normal breakouts, if you want. But the 7i76 option is a lot more flexible.
[17:13:33] <jthornton> I have a sample config file or you can use pncconf
[17:14:28] <Aero-Tec> I am running mach now and trying to move over to EMC
[17:14:37] <Aero-Tec> I am not a fan of mach
[17:14:59] <jthornton> I tried it once but it would not run my machine properly
[17:15:07] <Aero-Tec> having no end of grief with it
[17:15:34] <jthornton> sample config here
http://gnipsel.com/shop/emc2/emc2.xhtml
[17:16:02] * jthornton wanders off to take a nap
[17:16:03] <Aero-Tec> thing is my code is all for mach, I need to learn to code for EMC, but also keep production going
[17:16:55] <Aero-Tec> I hand code most things and hand optimize every thing
[17:17:40] <Aero-Tec> running lots of subs
[17:18:07] <Aero-Tec> so all my subs need to be redone and then the main code rewritten
[17:18:18] <Aero-Tec> wish I started with EMC
[17:18:29] <Aero-Tec> thanks for the link
[17:23:03] <andypugh> Aero-Tec: What's the Mach format for subs?
[17:24:34] <Aero-Tec> O10 and M99 for return
[17:25:10] <Aero-Tec> M98 P10 L3 to call the sub
[17:25:21] <Eartaker> Aero-Tec: whats wrong with mach?
[17:25:23] <Aero-Tec> P is the sub number
[17:25:39] <Aero-Tec> L is the number of times to run it
[17:26:00] <Aero-Tec> it keeps crashing
[17:26:09] <Aero-Tec> no named subs
[17:26:11] <andypugh> Ah, yes, that's different then. You can still use numbers for subs, but there is the option to use names
[17:26:29] <Aero-Tec> no conditional branches
[17:26:58] <Aero-Tec> will take off on its own every now and then
[17:27:23] <Aero-Tec> had a few parts distroyed that way
[17:27:28] -!-
skunkKandT [
[email protected]] has joined #emc
[17:27:41] <Aero-Tec> in mid production run in mid part run
[17:28:08] <Aero-Tec> full speed right through the part, well it would try
[17:28:36] -!-
FinboySlick [
[email protected]] has joined #emc
[17:28:49] <andypugh> Definitely Mach and not the G-code? That seems a failry serious drawback.
[17:28:58] <Aero-Tec> snapped cutter or spindle stopped and drive motors stalled
[17:29:14] <andypugh> I don't _think_ EMC2 ever does that.
[17:29:25] <Aero-Tec> I had run the program close to 50 time before it took off
[17:29:35] <Eartaker> sounds like code not Mach... I run Mach and have never had that issue
[17:29:41] <clytle374> run away machines are like cheating women, ya never really trust them again
[17:30:01] <Aero-Tec> mach lathe suck big time as it does not get any bug fix time to speak of
[17:30:05] <andypugh> Stepper machine, I assume, as you are talking Mach?
[17:30:23] <Aero-Tec> true, I have no trust in mach
[17:30:36] <Aero-Tec> yes stepper
[17:30:37] <Eartaker> Aero-Tec: what OS are you running it on/
[17:30:38] <Eartaker> ?
[17:30:43] <andypugh> Otherwise, runaway can be an electrical problem with servos
[17:31:02] <Aero-Tec> so no encoding problems and motor runaway
[17:31:11] <Aero-Tec> win xp
[17:31:31] <Ekkeri> andypugh, I have those spare rs422 input so why not to use differential limit switches? (if that is possible) :)
[17:31:33] <Eartaker> you could goto Win 2k
[17:31:34] <Aero-Tec> the lathe is servo
[17:31:45] <andypugh> Stepper runaway and software step generation means it has to be Mach's fault.
[17:32:09] <Aero-Tec> I have some win 2K as well
[17:32:18] <Ekkeri> andypugh, it just ~1$ extra per switch
[17:32:30] <Aero-Tec> the lathe threading is not great with mach
[17:33:08] <andypugh> Aye, I heard that.
[17:33:08] <Aero-Tec> also I am having walking on the lathe
[17:33:32] <Aero-Tec> I have to keep zeroing my x axis
[17:33:40] <Aero-Tec> but it comes and goes
[17:33:48] <Ekkeri> nice :/
[17:34:10] <andypugh> A full closed-loop servo setup in EMC2 should make that problem go away.
[17:34:14] <Aero-Tec> and to varying degrees
[17:34:15] <Eartaker> bad PID loop?
[17:34:45] <andypugh> Aero-Tec: Though last time I had that, it was the ballscrew coming loose...
[17:35:16] <Aero-Tec> gecko drives, so not real PID loop setup
[17:35:22] <Aero-Tec> just some pots
[17:35:46] <Eartaker> I have the gecko drives
[17:35:55] -!-
theorb [
[email protected]] has joined #emc
[17:36:25] <Aero-Tec> is there a PID loop for gecko servo drives?
[17:36:55] <Aero-Tec> as far as mach see it it is just a step and dir
[17:36:56] -!-
theorbtwo has quit [Ping timeout: 240 seconds]
[17:37:15] <Eartaker> Thepots are the adjustment for the loop
[17:37:19] <Eartaker> the pots
[17:37:51] <Aero-Tec> I have other problems with mach as well
[17:38:01] <Eartaker> the loop in internally closed to the drive
[17:38:05] <Aero-Tec> just not fun anymore
[17:38:40] -!-
Calyp [Calyp!~Caly@unaffiliated/calyptratus-tzm] has joined #emc
[17:38:57] <Aero-Tec> the loosing zero seems to be worse at startup
[17:39:28] <Eartaker> do you servos vibrate?
[17:39:41] <andypugh> Aero-Tec: Just bear in mind that you might have problems with EMC2 too, it isn't perfect. But we do try to make it so.
[17:39:43] <Aero-Tec> after awhile it will settle down and work OK till it crashes again
[17:40:38] <Eartaker> sounds like you need to adjust the drives... the servos should be almost quiet and make a noise every now and then
[17:40:43] <Aero-Tec> yes they vibrate
[17:40:55] -!-
theorb has quit [Ping timeout: 276 seconds]
[17:41:16] <Eartaker> http://www.geckodrive.com/ark-4/support.html?pid=33&id=112
[17:42:08] <Aero-Tec> some times they are quiet
[17:42:28] <Aero-Tec> they vibrate very little
[17:42:52] <Eartaker> The higher you can get the gain, the "crisper" the response will be. Go too high, and it will become unstable, and tend to oscillate, make constant noise, over-shoot position, etc. The idea is the turn up the gain (P) in increments, and see how it behaves. Each time you turn up the gain, you'll have to turn up the damping (D) as well. If damping is too high, response will be sluggish - it will be slow to move, and slow to stop. Too little damping, an
[17:43:01] <Aero-Tec> they can hum some at times
[17:44:00] <Aero-Tec> I followed the setup from gecko
[17:44:18] <Aero-Tec> may not be 100% but it should be close
[17:45:01] <Aero-Tec> did not use a scope to adjust it, so it is hard to be 100% spot on
[17:45:08] <Eartaker> you kinda have to go off of sound and the way it reacts if you dont have a scope
[17:45:40] <Aero-Tec> I could be wrong, maybe it is possible to be 100% by hand tuning and not scoping it
[17:47:01] <Eartaker> I would try readjusting them and see if that fixes your walking
[17:47:02] <Aero-Tec> have one just very big and bulky, and is setup in the electronics lab and not in the machine shop
[17:47:05] <Eartaker> it should
[17:47:17] <Eartaker> what boards are you using?
[17:47:25] <andypugh> D isn't "Damping"
[17:47:28] <Aero-Tec> thing is the walking come and goes
[17:47:58] <andypugh> Though I guess it can have a similar effect
[17:48:21] <andypugh> Aero-Tec: Encoder wheel coming loose when the motor is hot?
[17:48:31] <Aero-Tec> it can be rock solid for a long time
[17:49:06] <Aero-Tec> does not seem to be a temp thing
[17:49:24] <Aero-Tec> need to get a new scope
[17:49:37] <Aero-Tec> they are so small now days
[17:49:50] -!-
stormlight [
[email protected]] has joined #emc
[17:50:17] <mozmck> Aero-Tec: do you make airplane stuff?
[17:50:26] <Aero-Tec> not yet
[17:50:34] <clytle374> speaking of scopes, anyone have experience with Bitscopes?
[17:50:43] <Aero-Tec> will be making model airplane parts soon
[17:51:01] <mozmck> You're not the only one who has had Mach take off and ruin stuff. I've seen numbers of people have problems like that on the Mach list.
[17:51:16] -!-
theorbtwo [
[email protected]] has joined #emc
[17:51:24] -!-
GoSebGo [
[email protected]] has joined #emc
[17:51:31] <mozmck> I see. I'm interested in airplanes. I have a homebuilt project that I don't have time to work on.
[17:52:00] <Aero-Tec> at to boards, the lathe has the most cheapest simple BOB possible, feeding direct to geckos
[17:52:21] <clytle374> planes and helis here
[17:52:47] -!-
servos4ever has quit [Quit: ChatZilla 0.9.85 [SeaMonkey 2.0.11/20101206162726]]
[17:52:54] <Aero-Tec> I would love to build a plane
[17:53:02] <Aero-Tec> and then fly it
[17:53:23] <Aero-Tec> so what planes do you guys build and fly?
[17:53:42] <Aero-Tec> ultralights or bigger
[17:54:00] <mozmck> clytle374: neat!
[17:54:07] <clytle374> rc sized budjet here
[17:54:40] <clytle374> 3dhs 42" slick, AW edge 540T, 3 gaui helies.. 100,200, hurricane 200
[17:55:00] <andypugh> Aero-Tec: In EMC2 you would probably want to look at running that gecko from a velocity-mode stepgen, so that step rate becomes, in effect an analogue speed command, and the position loop would then be closed inside EMC2.
[17:55:05] <clytle374> I wish it was fullscale palnes and helies
[17:55:13] <Aero-Tec> was thinking a hop gyro copter would be a cool thing to make and fly
[17:55:15] <mozmck> I don't fly at all yet, but would love to. My project plane is a side-by-side 2 seat semi-copy of a Funk
[17:55:44] <mozmck> But I may make an RC model first just so I'll have *something* to fly.
[17:56:14] <clytle374> rc is fun, and all I can afford. got 20 hours in a cessna 152 years ago
[17:56:43] <andypugh> I didn't know Cessna existed 152 years ago!
[17:56:54] <Aero-Tec> flying is not cheap
[17:57:00] <andypugh> Somebody ought to have told the Wright Brothers and saved them a lot of work :-)
[17:57:00] <Aero-Tec> but so much fun
[17:57:12] <mozmck> clytle374 is old.
[17:57:48] <clytle374> haha, 152 is the model, not the time
[17:57:58] <mozmck> If I can afford a pilot's license, flying my own homebuilt will not cost much more than driving a car.
[17:58:14] <mozmck> I can do my own annuals, etc.
[17:58:52] <Aero-Tec> 152 is so small
[17:59:01] <Aero-Tec> I am to big for one
[17:59:32] <Aero-Tec> I need to loose weight if I am to fly for real
[17:59:36] <clytle374> homebuilt is the way to go. 152 was the cheapest thing to learn in at the time
[17:59:45] <Aero-Tec> in the small planes
[18:00:30] <Aero-Tec> have been up in the 185 and a Cessna twin
[18:00:41] <Aero-Tec> not sure the number
[18:01:39] <Aero-Tec> the instructor said I have to fly a 172 as the 152 would not get off the ground with both of us in it
[18:02:00] <Aero-Tec> he is not so small ether
[18:02:40] <mozmck> On another note, I want a small computer - maybe atom based - that I can put ClearOS on for an internet firewall/router. Anyone know of a good and inexpensive one? Or have a recommendation for a good motherboard?
[18:03:06] <andypugh> Same answer as always: BOXD525MW
[18:03:29] <andypugh> (fanless sounds good for a firewall/router)
[18:04:06] <Aero-Tec> andypugh: would a 5i25/7i77 work for a closed loop in EMC?
[18:04:23] <mozmck> Yes. I need two ethernet ports, so I have to be able to add one.
[18:05:10] <andypugh> Yes, that is what it is for. However the 7i77 is meant for drives which take an analogue voltage, and your Geckos take step/dir
[18:05:41] -!-
acemi [acemi!~acemi@unaffiliated/acemi] has joined #emc
[18:06:01] <Aero-Tec> oops, meant 7i76
[18:06:13] <andypugh> Yes, 7i76 is ideal :-)
[18:08:34] <andypugh> You might want to look at Pico too, they have some good interfaces with EMC2 support:
http://pico-systems.com/motion.html
[18:11:36] <Aero-Tec> is Pico better for use with EMC?
[18:12:06] <Aero-Tec> or is there no real difference?
[18:12:56] <Aero-Tec> also, what about cost, they close or is one cheaper then the other?
[18:13:19] -!-
ve7it [
[email protected]] has joined #emc
[18:13:39] <Aero-Tec> looked at the pricing of pico, not cheap but they may pack more on each board and be cheaper to setup
[18:14:34] <Tom_itx> seems to be better support here for mesa
[18:17:19] <Aero-Tec> leaning that way right now
[18:17:41] <Aero-Tec> but thanks for the info on pico
[18:29:03] <Jymmm> Can you find the swimming pool?
http://i42.tinypic.com/2ly4h9z.jpg
[18:31:32] <mrsun> ooo i know, lets build a pool ?
[18:39:32] -!-
theorbtwo has quit [Remote host closed the connection]
[18:39:38] -!-
theorbtwo [
[email protected]] has joined #emc
[18:42:06] -!-
Roguish [
[email protected]] has joined #emc
[18:44:19] <A2Sheds> fresno!
[18:45:33] -!-
acemi has quit [Quit: WeeChat 0.3.2]
[19:11:29] <skunkKandT> I just tapped about 80 1/2 inch holes in about 10 mins...
[19:11:38] * skunkKandT loves emc
[19:16:29] -!-
clytle374 has quit [Read error: Connection reset by peer]
[19:17:39] <archivist> break any taps?
[19:19:00] <skunkKandT> none
[19:19:27] <skunkKandT> (it was only about 1 inch thick and about .5 of that was clear)
[19:19:32] <skunkKandT> steel
[19:20:20] <skunkKandT> Viesturs did a nice reply on the cnc zone thread.
[19:20:41] <skunkKandT> http://www.cnczone.com/forums/1046479-post76.html
[19:24:01] -!-
clytle374 [
[email protected]] has joined #emc
[19:25:28] -!-
Jim_ [
[email protected]] has joined #emc
[19:28:11] <JT-Shop> holy moly what a good reply
[19:28:36] <skunkKandT> this must be the guy jone has been helping
http://www.youtube.com/watch?v=kEQORr2KyvE
[19:30:49] <archivist> he only missed one thing in that reply, the kins stuart did to fix errors in an old machine
[19:30:53] -!-
acemi [acemi!~acemi@unaffiliated/acemi] has joined #emc
[19:40:33] -!-
sumpfralle [
[email protected]] has joined #emc
[19:44:09] <Ekkeri> skunkKandT, what kind of machine do you have?
[19:44:19] -!-
factor has quit [Read error: Connection reset by peer]
[19:44:44] <skunkKandT> Ekkeri: an late 60's vintage hmc with a emc retrofit
[19:45:19] <skunkKandT> Ekkeri:
http://electronicsam.com/images/KandT/oldkandt.JPG
[19:46:01] <skunkKandT> Ekkeri:
http://youtu.be/39q6kvrSBSk
[19:46:01] <Ekkeri> niiiice :)
[19:46:41] <skunkKandT> peck tapping a part (too lazy to find a decent tap holder)
[19:47:17] <skunkKandT> http://youtu.be/jAcFeVlftrw
[19:50:07] -!-
stormlight has quit [Quit: stormlight]
[19:52:23] <FinboySlick> skunkKandT: I love your big old machine ;)
[19:55:38] <skunkKandT> Thanks - it has been running great!
[19:56:26] <FinboySlick> Must have been an adventure to move into place though.
[19:57:00] <clytle374> skunkKandT, that's a neat machine. iirc you were in the middle of it 2 years ago
[19:57:08] <clytle374> How long did it take you?
[19:58:50] -!-
theorbtwo has quit [Ping timeout: 248 seconds]
[20:00:51] <skunkKandT> heh - no clue... lets see.. This is when I started really working on it consistantly (pretty much once a week)
[20:00:53] <skunkKandT> http://www.youtube.com/watch?v=MucNO3Dij9o&feature=plcp&context=C3739ccdUDOEgsToPDskJLtQNB4GxIy6cUFF2E1C2j
[20:01:16] <clytle374> thought maybe you didn't want to talk about it
[20:01:36] -!-
garage_seb [
[email protected]] has joined #emc
[20:01:45] <skunkKandT> eh - it was fun.
[20:02:04] -!-
factor [
[email protected]] has joined #emc
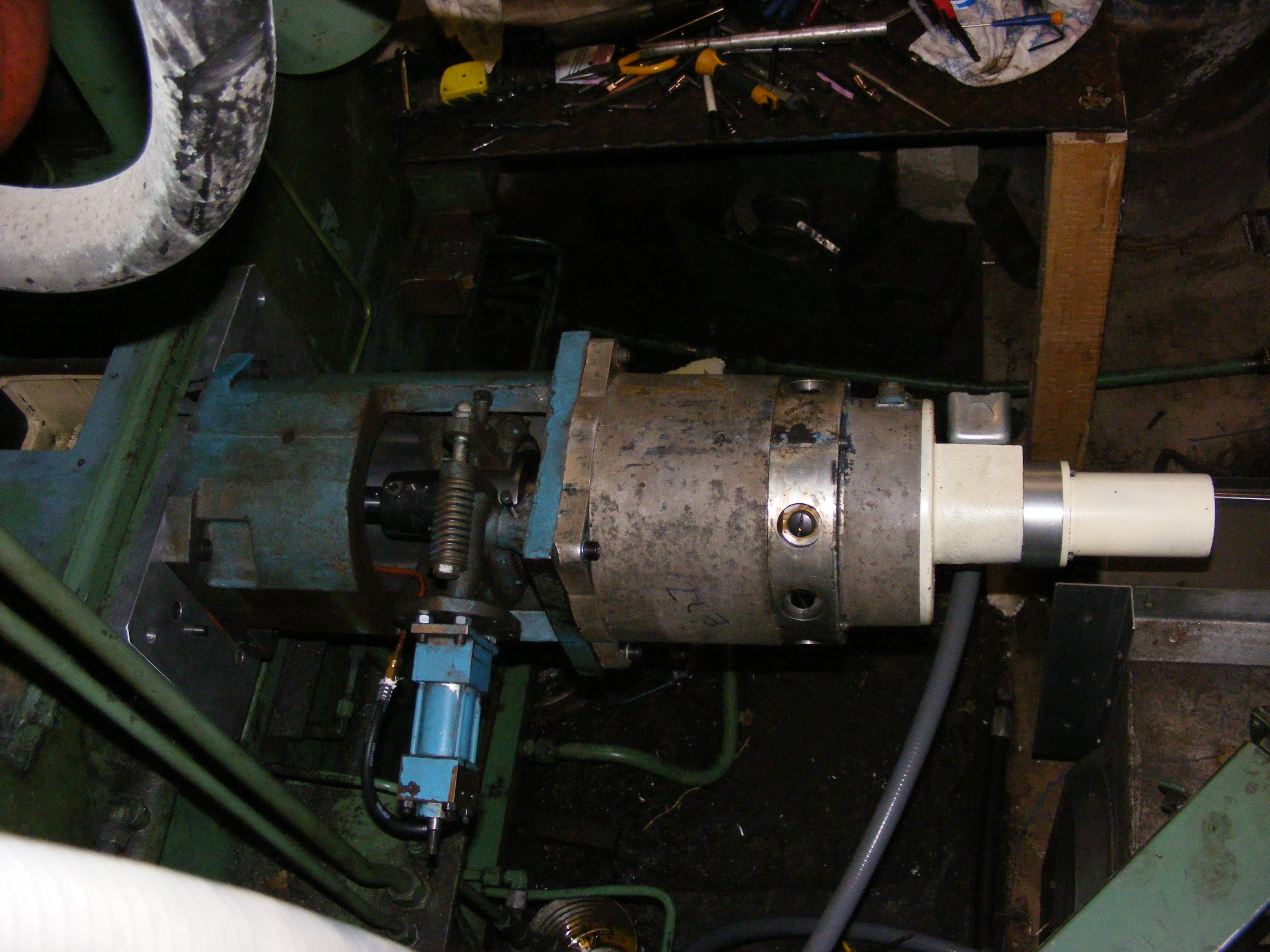
[20:02:39] <skunkKandT> This though needed a lot more than just emc.. (we converted it from hydraulic servos to brushed dc - switched it from 2.5 axis to full 3 (x and z was shared originally))
[20:03:14] <Ekkeri> hmm, is it possible to use encoder index pulse when homing so I don't need that accurate switches?
[20:03:20] <skunkKandT> yes
[20:03:29] -!-
Nick001-Shop [Nick001-Shop!~chatzilla@wlk-barre-208-103-141-214.dynamic-dialup.coretel.net] has joined #emc
[20:03:36] <Ekkeri> any info somewhere?
[20:03:44] <skunkKandT> that is how the k&t does it. finds the home switch - then finds the index
[20:04:08] <skunkKandT> http://linuxcnc.org/docs/2.4/html/config_ini_homing.html
[20:05:11] <Ekkeri> ok, thanks
[20:06:07] <Ekkeri> I think I read some other homing page before and it said nothing about index pulse
[20:08:53] <JT-Shop> Ekkeri: it is there
[20:11:16] <Ekkeri> yup, not sure why I even doubted :)
[20:13:49] <skunkKandT> from this
http://electronicsam.com/images/KandT/conversion/hyservo.JPG
[20:13:51] <skunkKandT> to
[20:14:10] <skunkKandT> http://electronicsam.com/images/KandT/conversion/yaxis/yassembly.JPG
[20:15:22] <FinboySlick> So it's got breaks too?
[20:15:57] <skunkKandT> on y
[20:16:02] <skunkKandT> (vertical axis)
[20:16:15] <skunkKandT> without it would just fall
[20:16:41] <FinboySlick> Hehe, cute notch on that rubber... hose?
[20:17:08] <FinboySlick> (top left)
[20:17:11] <skunkKandT> bearing ways and ball screws make it move very easy
[20:17:26] <skunkKandT> finger print smudge
[20:17:45] <FinboySlick> Oh...
[20:18:38] <skunkKandT> brake is only engaged when the servos drives are off
[20:18:53] -!-
sumpfralle has quit [Read error: Operation timed out]
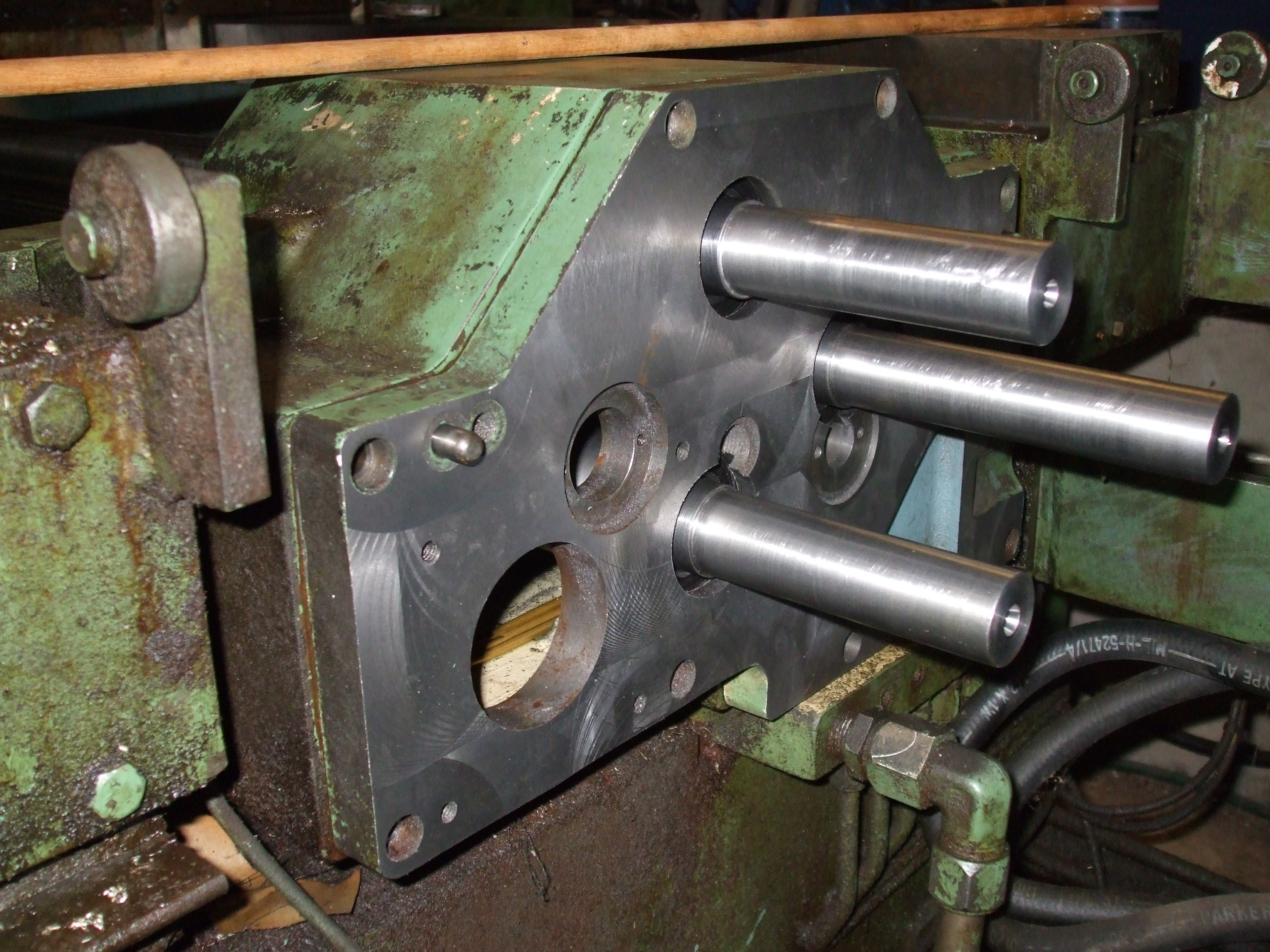
[20:30:26] <skunkKandT> this
http://electronicsam.com/images/KandT/conversion/xaxis/start.JPG
[20:31:45] <skunkKandT> to
http://electronicsam.com/images/KandT/conversion/xaxis/3shafts.JPG
[20:32:26] <skunkKandT> to
http://electronicsam.com/images/KandT/conversion/servo/x-z_servomount.jpg
[20:32:40] <skunkKandT> http://electronicsam.com/images/KandT/conversion/servo/x-zservo_mount.jpg
[20:33:36] <skunkKandT> http://www.youtube.com/watch?v=QU_O_Z7Vv8c&feature=mfu_in_order&list=UL
[20:36:36] -!-
mikegg has quit [Remote host closed the connection]
[20:39:07] -!-
isssy has quit [Quit: Bye Bye]
[20:43:20] <Nick001-Shop> Is there a way of multiple booting 10.04 & 2.4.6 on the same HD and having them completely separate for testing different systems out
[20:47:28] <clytle374> Nick001, you can partition the drive and have 2 separate installs
[20:48:14] <andypugh> Nick001-Shop You can multi-boot differnt kernels, and you can also have multiple Run-In-Place versions of EMC2. Both my machines have an installed 2.4 but also run a compiled 2.5. I believe you can have multiple run-in-place versions, and swap between them by calling the specific emc-environment script for each version.
[20:49:06] <clytle374> Speaking of axis falling. I was working on the mycenter last night and realized the counter weight chains aren't connected to weights. But an air cylinder :/
[20:49:50] <clytle374> You can have multiple run in place versions
[20:50:32] <clytle374> Probably have to alter the config directory or something so they don't share
[20:50:57] <andypugh> clytle374: An air-cylinder counterweight with a regulator gives a constant (adjustable) force just like a weight, but has the advantage of not doubling the moving mass
[20:52:01] <andypugh> Why can't you find a PCW when you want one?
[20:53:33] <clytle374> Yeah, I'm familiar with the concept, it's just something else I don't know the condition of it. OTH the weight is pretty reliable.
[20:58:18] -!-
sumpfralle [
[email protected]] has joined #emc
[20:58:31] -!-
GoSebGo has quit [Ping timeout: 276 seconds]
[20:59:37] -!-
garage_seb has quit [Quit: Leaving]
[21:01:09] <clytle374> been looking at high voltage scope probes. What I need it clip leads, can't I just rig a voltage divider onto test leads
[21:04:25] <andypugh> The place to ask that would be on the mailing list, Gene has done a lot of HV work.
[21:04:39] <jdhNC> how high is high?
[21:07:32] <clytle374> 440V or more like 515 around here
[21:10:04] <clytle374> I realized that my 2.4 failing exactly like 2.5 is due to rtai_smi not loading, it wasn't the rtai udev like I first thought
[21:11:02] <andypugh> rtai_smi only loads if you have the intel chipset
[21:11:08] <andypugh> (AFAIK)
[21:11:28] <clytle374> That's what I got
[21:12:59] <clytle374> mine dosn't automaticly load. But it makes 2.4 work
[21:13:14] <andypugh> You know that the rtapi_conf file is re-created every time you compile, from rtapi.conf.in (I think)
[21:13:35] <clytle374> No, didn't know that
[21:13:46] <andypugh> So it's easy to lose the smi fix
[21:15:50] -!-
Roguish has quit [Read error: Operation timed out]
[21:16:03] <clytle374> funny that not having it fails exactly like 2.5 fails
[21:20:15] <Nick001-Shop> Is there anything in EMC docs that can point me in the right dir. I'm getting tired of swapimg out hard drives to try different things out. I don't want to screw up my nearly working 2.4.6 to tryout 2.5
[21:24:02] <robin_sz> so when top reports process size, thats in bytes, right?
[21:24:22] <robin_sz> or kilobytes?
[21:31:38] -!-
sumpfralle has quit [Ping timeout: 240 seconds]
[21:33:15] <andypugh> Nick001-Shop: There are clues about it here:
http://wiki.linuxcnc.org/cgi-bin/emcinfo.pl?Installing_EMC2 but I don't know of any way to create a run-in-place emc2 other than by compiling.
[21:37:13] <andypugh> The way my system has ended up is that if I type "emc" at the command line I get 2.4.7. If I type . ./emc-dev/scripts/emc-environment then type "emc" I get the 2.5 version. I assume that if I had another directory tree under emc2-dev-2.6 I could switch to that one too. Note that the command seems to be dot-space-dot-slash-emc-environment exactly as shown in section 2.8. I think that makes the script run in the context of that
[21:37:13] <andypugh> particular terminal window
[21:40:52] <clytle374> Seems like the easiest would be to dual boot 2 installs
[21:42:14] <andypugh> rebooting to switch versions seems like a lot of trouble.
[21:43:31] <clytle374> true, I was thinking that one was for testing and the other for running.
[21:43:49] <clytle374> plus, I said easiest ;)
[21:44:28] -!-
WalterN has quit [Read error: Connection reset by peer]
[21:49:27] -!-
sumpfralle [
[email protected]] has joined #emc
[21:51:18] bootn3cklad is now known as
bootneck1ad
[21:55:14] -!-
mshaver [mshaver!~mshaver@173-167-237-41-ip-static.hfc.comcastbusiness.net] has joined #emc
[21:57:15] -!-
Mjolinor has quit [Remote host closed the connection]
[22:11:34] <Nick001-Shop> Doesn't seem to be a easier way than swapping HD's -)
[22:12:47] <Nick001-Shop> I guess I'll have to dig out the swap trays to make it a little easier
[22:13:04] -!-
Loetmichel [
[email protected]] has joined #emc
[22:13:12] <Loetmichel> re @ win7...
[22:46:08] -!-
sumpfralle has quit [Ping timeout: 240 seconds]
[22:50:16] <Jymmm> SWPadnos: ROTF...
http://www.deadseriousnews.com/?p=524
[22:52:30] <andypugh> Sytikes me as unlikley.
[22:52:50] -!-
Fox_Muldr has quit [Ping timeout: 252 seconds]
[22:52:51] <andypugh> I don't think dead people have much blood pressure.
[22:54:45] -!-
Fox_Muldr [
[email protected]] has joined #emc
[22:58:41] <Jymmm> andypugh: Actually, an erection in a corpse is common, not sure about the orgasm though.
[23:00:09] <andypugh> It's common in death by hanging, but I think that happens at the time of death, and not some time later. (I am not sure how long it lasts for, either)
[23:00:59] <Jymmm> either way, that is still funny
[23:04:04] -!-
sumpfralle [
[email protected]] has joined #emc
[23:05:19] <Nick001-Shop> Can't even drop dead without a lawyer figuring out a way of getting money from you -)
[23:12:13] <Loetmichel> hmmm, the "erection" is more of a Rigor mortis than a erection.
[23:12:44] <Loetmichel> and maybe he had some living semen left... but i doubt the orgasm very much.
[23:13:39] <Loetmichel> OR he wanst dead just "seemingly dead"
[23:15:40] <andypugh> Yeah, if he was capable of orgasm then the story is a lot sadder than it seems, as the poor dude has been buried alive
[23:19:31] <Loetmichel> andypugh: not necsessarily (sp?) ... maybe the orgasm had killed him for good
[23:20:21] <Loetmichel> in the seemingly dead-state is the pulse THAT slow that no oxygen for powerful actions is there
[23:20:36] -!-
maximilian_h [
[email protected]] has joined #emc
[23:20:56] -!-
maximilian_h has quit [Client Quit]
[23:34:59] <clytle374> even dead guys getting more action than me.
[23:36:18] <Loetmichel> clytle374: cant imagine that, being married over 10 years ;-)
[23:39:24] * JT-Shop checks the topic
[23:40:13] <Loetmichel> JT-Shop: hihi... its quiet here atm. are we hurting someone with the "smalltalk"?
[23:41:37] <JT-Shop> LOL, not me
[23:50:33] -!-
pcw_home [
[email protected]] has joined #emc
[23:54:16] <FinboySlick> The 'mostly dead' bit made me think of Billy Crystal as Miracle Max in The Princess Bride.
[23:54:27] <FinboySlick> I mean 'seemingly dead'.
[23:54:29] <FinboySlick> Anyway.
[23:56:39] <mshaver> "Mourning Glory Mortuary", "Felicity Marmaduke", no way. I call shenanigans!
[23:57:18] <FinboySlick> mshaver: I counter with 'serious news'.
[23:57:21] <clytle374> pcw_home, remember the watchdog issue I was having?
[23:57:30] <clytle374> It doesn't happen on emc2.4
[23:58:31] <mshaver> FinboySlick: Touche
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}