Back
[00:04:24] -!- rob_h has quit [Ping timeout: 264 seconds]
[00:07:44] -!- mhaberler [[email protected]] has joined #linuxcnc
[00:08:47] -!- zzolo has quit [Quit: zzolo]
[00:14:12] -!- mattions has quit [Ping timeout: 248 seconds]
[00:21:27] -!- Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #linuxcnc
[00:23:58] -!- micges has quit [Quit: Leaving]
[00:39:45] -!- Youdaman has quit []
[00:41:04] -!- JesusAlos has quit [Quit: ChatZilla 0.9.90 [Firefox 18.0.2/20130201065344]]
[00:42:00] <Icekiller> question guys
http://www.wantmotor.com/ProductsView.asp?id=160&pid=80 57BYGH115-003
[00:42:08] <Icekiller> what kind of amp & voltage can i use on that?
[00:46:41] <Valen> read it from the table
[00:46:45] -!- ravenlock [ravenlock!~ravenlock@enlightenment/developer/ravenlock] has joined #linuxcnc
[00:56:18] -!- sumpfralle1 has quit [Read error: No route to host]
[00:57:15] -!- sumpfralle [[email protected]] has joined #linuxcnc
[00:58:58] -!- sumpfralle1 [[email protected]] has joined #linuxcnc
[01:01:53] -!- sumpfralle has quit [Ping timeout: 255 seconds]
[01:06:28] -!- sumpfralle1 has quit [Ping timeout: 248 seconds]
[01:07:26] -!- sumpfralle [[email protected]] has joined #linuxcnc
[01:15:02] -!- jst has quit [Remote host closed the connection]
[01:15:38] <Tom_itx> what section of hal would i find the 'cycle start' signal?
[01:15:49] <Tom_itx> err the hal config
[01:16:38] -!- jst [jst!~quassel@2620:101:8003:200:224:e8ff:fe39:34c2] has joined #linuxcnc
[01:16:59] -!- jst has quit [Remote host closed the connection]
[01:17:48] -!- jst [jst!~quassel@2620:101:8003:200:224:e8ff:fe39:34c2] has joined #linuxcnc
[01:19:18] <Tom_itx> i think it's time to wire that button on my MPG
[01:24:39] <Jymmm> Multi-Player Game
[01:25:40] <Jymmm> ?
[01:26:30] <Tom_itx> manual pulse generator
[01:26:45] <Jymmm> ah
[01:28:51] -!- Gene34 has quit []
[01:29:21] <Tom_itx> i need the signal the 'run' button is wired to in axis
[01:29:45] <jdh> isn't it cycle-start or something like that?
[01:30:03] <Tom_itx> i haven't found it yet in hal config
[01:30:16] <jdh> it isn't there until you add it
[01:31:23] <Tom_itx> shouldn't it be listed there from axis?
[01:32:25] <jdh> halui.program.run perhaps
[01:32:44] <jdh> http://linuxcnc.org/docs/html/hal/halui_examples.html
[01:36:21] -!- Gene34 [[email protected]] has joined #linuxcnc
[01:42:14] <Tom_itx> thanks
[01:42:23] <Tom_itx> i'll work on that after bit
[01:42:29] <Tom_itx> finishing a couple parts first
[01:43:18] -!- tmcw has quit [Remote host closed the connection]
[01:47:43] <jdh> you could make me a probe.
[01:48:20] <skunkworks> this guy seems to be using rtnet on rtai
[01:48:21] <skunkworks> http://code.google.com/p/rt-8p8c/
[01:50:25] <Tom_itx> jdh, where did you find that link? i can't seem to find it on the doc menu
[01:51:58] <jdh> google
[01:52:00] -!- adb has quit [Ping timeout: 276 seconds]
[01:59:10] -!- JesusAlos [[email protected]] has joined #linuxcnc
[02:01:39] <JesusAlos> I attempt stop spindle when push pause button in axis
[02:01:50] <JesusAlos> but can't when automode
[02:02:16] <Tom_itx> not a good idea anyway
[02:02:34] <Tom_itx> but i think you can
[02:03:19] <JesusAlos> I use spindle output to hot wire foam
[02:03:28] <JesusAlos> 2 axis machine
[02:03:35] <JesusAlos> I must stop
[02:04:25] <JesusAlos> I use : halui.spindle.start and halui.spindle.stop
[02:04:27] <Tom_itx> i can't remember if mine will allow that or not in auto mode
[02:04:44] <JesusAlos> but if machine is in automode do error
[02:08:03] <skunkworks> halui.program.is-paused (bit, out) - status pin telling that a program is paused
[02:08:10] <skunkworks> can you use that?
[02:08:57] <Tom_itx> http://tom-itx.dyndns.org:81/~webpage/cnc/configs/sherline/my_jog.hal
[02:09:06] <Tom_itx> there's my spindle control
[02:09:12] <Tom_itx> for my mpg
[02:10:13] -!- wildbilldonovan has quit [Quit: EOT]
[02:10:52] -!- Tom_sbc [Tom_sbc!~Tl@unaffiliated/toml/x-013812] has joined #linuxcnc
[02:11:27] <JesusAlos> you say like ? if halui.program.is-paused=1 halui.spindle.stop=1
[02:11:54] <skunkworks> that would be my thought... But I am just throwing things ut
[02:12:01] <skunkworks> out
[02:12:35] <Tom_sbc> net spindle-request toggle.1.in <= hm2_[HOSTMOT2](BOARD).0.gpio.013.in_not
[02:12:38] <Tom_sbc> net spindle-toggle toggle2nist.1.in <= and2.4.out
[02:12:47] <Tom_sbc> net spindle-is-on toggle2nist.1.is-on <= halui.spindle.is-on
[02:12:50] <Tom_sbc> net spindle-start halui.spindle.start <= toggle2nist.1.on
[02:12:50] <Tom_sbc> net spindle-stop halui.spindle.stop <= toggle2nist.1.off
[02:13:03] -!- Tom_itx has quit [Disconnected by services]
[02:13:08] Tom_sbc is now known as Tom_itx
[02:13:57] <Tom_itx> you should add something in there for program paused too though
[02:15:39] -!- atom1 [atom1!~tom@unaffiliated/toml/x-013812] has joined #linuxcnc
[02:16:12] -!- atom1 has quit [Client Quit]
[02:16:51] <JesusAlos> the idea is pause spindle when push pause buton of axis, and turn on when quit pause
[02:17:27] <JesusAlos> the problem is the spndle is force on always
[02:18:01] <JesusAlos> for the gcode instruction or button on spindle, I think,
[02:18:18] -!- sumpfralle has quit [Read error: Operation timed out]
[02:18:50] <JesusAlos> and If I forde off with hal pin, is antagonistic function
[02:18:56] <JesusAlos> and do error
[02:23:03] <Tom_itx> what about writing a subroutine and calling it with a python component?
[02:23:11] <Tom_itx> i have a 'home' button like that
[02:28:57] <JesusAlos> I think that is the same case
[02:29:35] <JesusAlos> in one part of linuxcnc put spindle ON. In other part, put OFF
[02:30:02] <JesusAlos> is antagonistic function
[02:31:26] -!- FinboySlick [[email protected]] has joined #linuxcnc
[02:34:29] -!- asdfasd has quit [Ping timeout: 256 seconds]
[02:37:09] -!- Wildhoney has quit [Ping timeout: 256 seconds]
[02:57:40] -!- tmcw has quit [Remote host closed the connection]
[03:07:48] -!- skunkworks has quit [Remote host closed the connection]
[03:09:57] -!- skunkworks [skunkworks!~chatzilla@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[03:11:17] -!- ravenlock has quit [Ping timeout: 252 seconds]
[03:17:38] -!- skorasaurus has quit [Ping timeout: 245 seconds]
[03:22:22] <JesusAlos> GN
[03:22:35] -!- JesusAlos has quit [Quit: ChatZilla 0.9.90 [Firefox 19.0/20130215130331]]
[03:28:06] -!- zzolo has quit [Read error: Connection reset by peer]
[03:28:06] zzolo_ is now known as zzolo
[03:32:03] -!- Valen has quit [Quit: Leaving.]
[03:33:39] <Tecan> http://i.imgur.com/V1ojcjt.jpg
[03:34:59] -!- zzolo has quit [Quit: zzolo]
[03:35:08] <jdh> are you prepping?
[03:35:18] <Tecan> for z day ?
[03:35:21] <Tecan> naw
[03:35:28] <Tecan> just getting ready to retire someday
[03:35:34] -!- mhaberler has quit [Quit: mhaberler]
[03:38:47] -!- [1]DaveB has quit [Quit: I love my HydraIRC -> http://www.hydrairc.com <-]
[03:42:09] <jdh> I've been at a vendor site all week for integration testing... they have a huge Haas Mill thing. Bed is like 3'x6' or bigger. Looks nifty cutting.
[03:43:14] -!- tomp [[email protected]] has joined #linuxcnc
[03:44:10] -!- tomp has quit [Client Quit]
[03:45:22] -!- tjtr33 [[email protected]] has joined #linuxcnc
[03:45:31] -!- racycle has quit [Quit: racycle]
[03:50:17] -!- KimK has quit [Quit: Leaving]
[03:56:50] <jdh> http://www.ebay.com/itm/251231208108?
[04:02:08] <r00t4rd3d> my tractor turned out sweet
[04:03:11] <r00t4rd3d> iam staining this atm
http://i.imgur.com/3vokrVL.jpg
[04:06:05] <r00t4rd3d> somehow the real thing looks better then the preview
[04:12:06] <tjtr33> skunkworks: that rt-8p8c project... the card seems to have a cnxr with pairs of XYZA step & dir, and a ? spindle output PWM and PWMD(ir?)
[04:12:07] <tjtr33> have you looked into the code? does it preclude servos?
[04:12:36] -!- tmcw has quit [Ping timeout: 248 seconds]
[04:16:04] <r00t4rd3d> Find Waldo
http://i.imgur.com/ysbM64o.jpg
[04:18:57] -!- sparr [sparr!~kvirc@pdpc/supporter/active/sparr] has joined #linuxcnc
[04:18:59] <ReadError> you put it back together r00t4rd3d ?
[04:19:03] <sparr> I am using GRBL to run a desktop CNC mill. After running this gcode file all future moves I send to the controller result in it moving approx 10x as far as it should. What would cause that?
http://www.shapeoko.com/wiki/images/7/77/Hello_World_ShapeOko.txt
[04:20:31] <r00t4rd3d> yeah
[04:20:51] <ReadError> did you add your upgrades?
[04:21:10] <r00t4rd3d> just the extended carriages
[04:21:21] <r00t4rd3d> i need to cut the pieces for my new z axis
[04:23:13] <jdh> sparr: you do inches?
[04:23:41] <r00t4rd3d> or the other way around
[04:23:48] <sparr> jdh: pretty sure you nailed it, now I see that file switches from mm to inches, and it might be moving 25.4x as far as it should. thanks!
[04:25:30] <r00t4rd3d> sparr, what you get for speed out of that?
[04:25:45] <r00t4rd3d> like inch per minute
[04:25:52] <sparr> hmm?
[04:25:56] <sparr> feed rate?
[04:26:01] <r00t4rd3d> yeah
[04:26:06] -!- KimK [[email protected]] has joined #linuxcnc
[04:29:00] <r00t4rd3d> i know they can only take 1 line of gcode at a time
[04:29:56] <sparr> not sure what my max is
[04:30:02] <sparr> let me see if I can reach it
[04:30:29] <r00t4rd3d> what where you getting?
[04:30:55] <AR_> shapeoko is belt drive, should be pretty fast
[04:31:04] <sparr> the firmware defaulted to 1100mm/min
[04:31:26] <sparr> so 43"/min
[04:31:26] <AR_> eh, could do faster than that
[04:31:32] <sparr> can surely do much faster
[04:34:12] <sparr> 270"/min seems to work fine
[04:34:54] <sparr> and that's faster than I expect I'll ever want to go with an actual tool in use
[04:34:57] <sparr> even just a plotter
[04:35:52] <sparr> the working area is only about 36"x12" currently, soon to be 36x36
[04:36:35] <r00t4rd3d> same as mine
[04:37:33] <r00t4rd3d> i cant believe even the grbl shield is better then the tb6560
[04:37:40] <AR_> hrm.. and to think I spent about $900 building a machine with a 7x7" work area..
[04:38:01] <AR_> really more like 6x6
[04:38:24] <r00t4rd3d> i spent about 8 originally
[04:38:46] <AR_> i have to sell some of the parts i didnt use
[04:38:57] <r00t4rd3d> you have more of a mill
[04:39:03] <AR_> yeah
[04:39:42] <r00t4rd3d> i have a redneck router
http://i.imgur.com/rci2py7.jpg
[04:40:13] <AR_> you spent 800 on that?
[04:40:43] <sparr> for electronics I went with the printrboard
[04:40:50] <AR_> nice electronics enclosure
[04:40:54] <sparr> this isn't done yet:
http://www.youtube.com/watch?v=IJulcba1WAc
[04:41:18] <sparr> i think my total cost so far is around $500
[04:41:27] <sparr> another $80 in material coming to make it wider
[04:41:49] <r00t4rd3d> AR_, that pic was after a couple hundred in upgrades
[04:42:07] <Tom_itx> ok remote start works now
[04:42:51] <r00t4rd3d> when i first built my router it was all mdf
[04:42:52] <AR_> r00t4rd3d, see, this is where i fell into the trap
[04:43:18] <AR_> looking at all the DIY machines, I figured, 'man, i could easily build those for so much cheaper'
[04:43:27] <AR_> but then... yeah...
[04:43:28] <Tom_itx> thanks jdh
[04:43:34] <AR_> i found out i was wrong
[04:44:10] <r00t4rd3d> older pic
http://i.imgur.com/09zWK01.jpg
[04:44:15] <jdh> ?
[04:44:29] <Tom_itx> i got the program run working
[04:44:31] <Tom_itx> thanks
[04:44:36] <jdh> cool
[04:44:40] <Tom_itx> i had to invert the pin but...
[04:44:42] <AR_> lol
[04:44:45] <jdh> r00t: ditch the habit
[04:44:56] <AR_> r00t4rd3d, on my controller board that's the same as yours
[04:45:03] <AR_> when i went to wire up my limit switches
[04:45:08] <jdh> TB on a board?
[04:45:13] <AR_> i found that two of the input pins didnt work!
[04:45:25] <AR_> turns out two of those optocoupler chips were bad
[04:45:37] <AR_> i wonder how many of the other ones are that i havent ever used
[04:45:51] <Tom_itx> jdh, the behavior wasn't what i expected though
[04:46:01] <Tom_itx> i figured it would start running code right away
[04:46:07] <r00t4rd3d> my tb6560 has been flawless
[04:46:11] <jdh> ifyou are automode?
[04:46:12] <r00t4rd3d> other then slow as fuck
[04:46:15] <Tom_itx> but instead it starts the program but puts it in pause mode
[04:46:33] <r00t4rd3d> I can only get it to go 18ipm
[04:46:50] <jdh> using 12v?
[04:46:56] <r00t4rd3d> 24v
[04:47:27] <r00t4rd3d> my motors are small though too kinda
[04:48:07] <AR_> my Z axis i have set the slowest at 9600 steps per inch, 20ipm
[04:48:07] <jdh> crank it up to 30
[04:48:07] <r00t4rd3d> https://www.sparkfun.com/products/10847
[04:48:12] <jdh> if you have a spare.
[04:48:31] <jdh> that's tiny
[04:48:36] <AR_> i have my X and Y running over 30ipm with a belt reduction
[04:49:13] <tjtr33> Tom_itx: maybe the mode is stepbystep /blockbyblock instead of fullrun/automatic
[04:49:13] <AR_> like 32000 steps per inch or something
[04:49:14] <tjtr33> ( different controls call the modes different things but they all have modes )
[04:49:20] <r00t4rd3d> i need a gecko and bigger motors
[04:51:05] <AR_> i'm going to actually try milling some parts tomorrow
[04:51:08] <AR_> limit switch mounts
[04:51:21] <jdh> I need some of those
[04:52:43] <AR_> i'm going to just try island milling a block to get two posts that fit snugly in the two holes on the switch
[04:53:13] <jdh> heh, that sounds like more effort than drilling/tapping
[04:53:22] <jdh> but, if it fits, it will be cool
[04:53:24] <r00t4rd3d> more so for 6x6
[04:53:32] <AR_> http://snag.gy/MY55R.jpg
[04:54:01] <r00t4rd3d> wtf is that program?
[04:54:05] <AR_> mastercam
[04:55:08] <jdh> I could see doing that if you were pocketing the switch. Otherwise, seems excessive.
[04:55:35] <r00t4rd3d> if you would have put your motors on the other way you would have 3 more inches of travel
[04:56:09] <AR_> lol not really
[04:56:18] <AR_> i only can crash into my X motor
[04:56:39] <AR_> i could get a longer belt and mount it out further to clear it
[04:57:20] <AR_> the limiting factor was the 350mm long bearing rails
[04:57:33] <r00t4rd3d> hopefully this summer I can sell some crack and build a 4x4
[04:57:39] <AR_> yeah
[04:58:37] <r00t4rd3d> i need 350oz motors
[05:01:35] <AR_> i need 450 oz
[05:01:58] <AR_> nah actually those would just twist my machine
[05:03:11] <r00t4rd3d> http://www.cncrouterparts.com/380-oz-in-nema-23-stepper-motor-14-shaft-p-151.html
[05:05:45] <Tom_itx> tjtr33, i think it's more of a safety feature
[05:06:00] -!- sparr has quit [Ping timeout: 256 seconds]
[05:06:17] <Tom_itx> it switches to auto but asserts the pause signal
[05:06:36] <Tom_itx> then i hit my pause/resume and it starts
[05:07:38] <tjtr33> ok, but it acts differently than the button on the main gui, so i spose' the code has to be check thru to find the missing bits
[05:08:08] <tjtr33> its a great idea ( i can see even a 2 button hands safety use )
[05:08:27] -!- sparr [[email protected]] has joined #linuxcnc
[05:08:27] -!- sparr has quit [Changing host]
[05:08:28] -!- sparr [sparr!~kvirc@pdpc/supporter/active/sparr] has joined #linuxcnc
[05:08:32] <tjtr33> like on a punch press
[05:08:35] <Tom_itx> http://linuxcnc.org/docs/html/hal/halui_examples.html
[05:08:37] <Tom_itx> i used that
[05:09:07] <Tom_itx> my pause/resume is different
[05:09:35] <tjtr33> were you in auto before the button press?
[05:09:49] <Tom_itx> no
[05:09:49] <Tom_itx> manual
[05:10:12] <Tom_itx> i watched it in hal config
[05:11:04] <tjtr33> ok, nice write-up, dang specific to your needs ( these linuxcnc devs are great )
[05:11:58] <Tom_itx> i do need to work on my spindle routine though
[05:13:32] -!- AR_ has quit [Ping timeout: 255 seconds]
[05:14:18] <Tom_itx> i can stop it while in auto mode and it messes with the pause/resume button
[05:14:18] <Tom_itx> i thought thru the logic once but i haven't acutally applied it yet
[05:15:16] <tjtr33> hah the pause & resume reminds me, we built an edm to rough the surface up on a transfer belt
[05:15:22] <tjtr33> ( metal belt with holes and edges like camera film). the die press would advance one hole,
[05:15:23] <tjtr33> a forth based uP would push buttons on an Elox EDM and cut for a time, then tell the die press to punch another hole
[05:15:52] <tjtr33> being able to fake button presses is handy
[05:18:02] -!- sparr has quit [Ping timeout: 252 seconds]
[05:25:16] -!- dhoovie [[email protected]] has joined #linuxcnc
[05:26:19] -!- psha [[email protected]] has joined #linuxcnc
[05:34:05] -!- Keknom has quit [Quit: Leaving.]
[05:39:21] <Tecan> have you guys tried openArtist linux ?
[05:39:33] <Tecan> its a nice for vm to see whats out there
[05:39:42] <Tecan> pretty slick / smooth
[05:44:53] -!- jfire has quit [Quit: Leaving.]
[06:02:04] -!- Fox_Muldr has quit [Ping timeout: 246 seconds]
[06:04:12] -!- Fox_Muldr [[email protected]] has joined #linuxcnc
[06:15:40] -!- sparr [[email protected]] has joined #linuxcnc
[06:15:40] -!- sparr has quit [Changing host]
[06:15:40] -!- sparr [sparr!~kvirc@pdpc/supporter/active/sparr] has joined #linuxcnc
[06:21:19] -!- dhoovie has quit [Ping timeout: 246 seconds]
[06:37:09] -!- kwallace [[email protected]] has parted #linuxcnc
[06:42:27] -!- mhaberler [[email protected]] has joined #linuxcnc
[06:47:17] -!- tmcw has quit [Remote host closed the connection]
[06:54:18] -!- tjtr33 [[email protected]] has parted #linuxcnc
[07:01:10] -!- zzolo has quit [Quit: zzolo]
[07:15:35] -!- bedah [[email protected]] has joined #linuxcnc
[07:18:45] -!- psha has quit [Read error: Connection reset by peer]
[07:23:36] -!- FinboySlick has quit [Quit: Leaving.]
[07:28:47] -!- Tecan has quit [Quit: Ex-Chat]
[08:01:23] -!- DJ9DJ [DJ9DJ!~Deejay@unaffiliated/dj9dj] has joined #linuxcnc
[08:01:40] <DJ9DJ> moin
[08:05:41] -!- Tecan [[email protected]] has joined #linuxcnc
[08:05:41] -!- Tecan has quit [Changing host]
[08:05:41] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[08:14:45] -!- Gene34 has quit [Ping timeout: 252 seconds]
[08:19:04] -!- Gene34 [[email protected]] has joined #linuxcnc
[08:26:29] -!- dhoovie [[email protected]] has joined #linuxcnc
[08:32:20] -!- e-ndy has quit [Quit: ZNC - http://znc.sourceforge.net]
[08:35:09] -!- racycle has quit [Quit: racycle]
[08:40:20] -!- rob_h [[email protected]] has joined #linuxcnc
[08:40:27] -!- e-ndy [[email protected]] has joined #linuxcnc
[08:48:53] -!- e-ndy has quit [Remote host closed the connection]
[08:59:12] <mrsun_> hmm backlash in the Z axis is a strange little beasty isnt it? :P
[08:59:19] <mrsun_> atleast if you try and compensate it :P
[09:01:16] -!- DJ9DJ has quit [Quit: brb]
[09:01:41] <archivist> need to remove/fix stiction
[09:03:22] <mrsun_> archivist, ye but if i losen up the head so it will freefall its to lose for milling :P
[09:03:33] -!- DJ9DJ [DJ9DJ!~Deejay@unaffiliated/dj9dj] has joined #linuxcnc
[09:03:37] <DJ9DJ> re
[09:03:46] -!- asdfasd [[email protected]] has joined #linuxcnc
[09:05:27] <mrsun_> i could just make a antibacklash nut but the bastards have made left handed thread on the Z axis screw :P
[09:06:36] <archivist> lh is nearly as easy on a lathe :)
[09:07:59] <mrsun_> archivist, i guess, but its like an M8 nut :P
[09:08:03] <mrsun_> i guess i could make a tap
[09:08:15] <mrsun_> and make a antibacklash nut out of delrin or something
[09:10:48] <mrsun_> annoying thing with stiction in the Z is that when moving down to a cut the backlash gets Z in the downstroke, then you start cutting and it falls down like 0.1mm more :P
[09:24:50] <Jymmm> Does anyone know anything about flywheels? In a nutshell, in a hand crank situation, would it be beneficial? Drawbacks?
[09:25:38] <Jymmm> Could I use a "container" and fill it up with water as needed for the mass?
[09:28:00] <archivist> hehe no
[09:28:13] <Jymmm> what if I "gel" the water
[09:28:35] <archivist> use a lump of a real solid
[09:28:58] <Jymmm> sand in a compartmental "mass"?
[09:29:10] <Jymmm> like a sliced pie.
[09:29:16] <archivist> no
[09:29:20] <archivist> use a solid
[09:29:46] <Jymmm> ok, solid. what about the benefits/drawbacks?
[09:30:00] <archivist> the forces in flywheels need some understanding
[09:30:33] <Jymmm> I'm thinking like the old foot powered sewing machines
http://farm4.static.flickr.com/3607/3458383777_ac04f5fc68.jpg
[09:31:08] <Jymmm> It had a 12-14" wheel, I guess that was the mass.
[09:32:40] <Jymmm> Darn, no large images
http://www.hipgallery.com/photopost2/data/500/15treadle.jpg
[09:33:26] -!- R2E4 [[email protected]] has joined #linuxcnc
[09:33:35] -!- bedah has quit [Quit: Ex-Chat]
[09:33:38] <Jymmm> I used one of those a long time ago, it took very little effort, and your foot only traveled about 3" total.
[09:34:47] <archivist> a sewing machine needs little effort, it having a flywheel has no relation
[09:36:07] <R2E4> Hi guys. I am looking for some direction. I have a Bridgeport series 1 R2E4 boss 9 coming 2 march and I want to strip the elecs and put a new system in and use existing servo motors and encoders.
[09:36:41] <archivist> the flywheel is like a capacitor in a power supply, you provide intermittent power and the flywheel accepts the power and gives it out smoothing the action
[09:37:07] <Jymmm> stored mechanical energy
[09:37:13] <R2E4> I dont want to use step and dir, so am turning to LinuxCNC. I am trying to find one of the documented bords that would talk to the servo's.
[09:37:35] <archivist> R2E4, keep lurking I think others have done those too
[09:37:42] <Loetmichel> moin
[09:37:54] <Loetmichel> ups... mornin'
[09:38:32] <archivist> R2E4, most use mesa cards for servo systems
[09:39:25] <R2E4> OK, I'll start reading up on those.
[09:39:40] <archivist> R2E4, your existing servo amplifiers may be usable, so dont throw those too quickly
[09:40:11] <R2E4> I thought of that but what about reliability?
[09:40:39] <R2E4> I really don't want to have to worry about them blowing in a month or so after upgrade.
[09:40:49] <archivist> that I do not know, but some retro fits retain the amps
[09:41:14] <Jymmm> archivist: Basically what I want to do is use something like a drum peddle to crank a dc motor to generate electricity
[09:41:22] <R2E4> I'll keep that in mind..... thanks
[09:41:42] <Jymmm> archivist: Thus where the flywheel or just a large wheel (like the sewing machine) comes into play.
[09:42:23] <Jymmm> archivist: It's just a twist on the old hand crank generators.
[09:42:28] <archivist> Jymmm, just use a bicycle frame
[09:42:37] <Jymmm> archivist: Has to fit into a backpack.
[09:43:04] <R2E4> That would be a big backpack....
[09:43:07] <archivist> see the hand shake chargers
[09:43:37] <Jymmm> archivist: LOL, I have one of those flashlights.... phuk me, and it has a 1F cap in it =)
[09:43:43] <archivist> generating a reasonable amount needs effort
[09:44:27] <Jymmm> sure
[09:45:18] <archivist> flywheels are heavy
[09:45:22] <Jymmm> archivist: Got the idea from this 60s video
http://www.youtube.com/watch?v=RgRT6WAStaE
[09:45:37] <Jymmm> archivist: Right, thus the water/sand/etc
[09:45:42] <cncbasher> R2E4:
http://gnipsel.com/shop/bp1/bp1.xhtml
[09:48:23] <R2E4> cncbasher: thats badaass
[09:48:31] <R2E4> Is it done?
[09:48:58] <cncbasher> yea , it's JT's
[09:49:20] <R2E4> Servo's or steppers?
[09:49:21] <cncbasher> bridgeports are pretty easy
[09:49:29] <cncbasher> servo's
[09:49:33] -!- adb [[email protected]] has joined #linuxcnc
[09:49:47] <R2E4> ooooooohhh. Now this is getting interesting.
[09:50:06] <R2E4> mesa boards?
[09:50:13] <cncbasher> yea
[09:50:36] <R2E4> ok, I need the address of his hsop and the keys so I can take a look at it....hehe
[09:50:59] <Jymmm> ...and kevlar.
[09:51:19] <cncbasher> you'll need a few pry bars too
[09:51:26] <R2E4> is he happy with it the way it turned out?
[09:51:47] <cncbasher> he'll be showing up here shortly
[09:52:00] <Jymmm> about 2-3 hours
[09:52:40] <cncbasher> JT-SHOP: R2E4 would like info on convertion of bridgeport
[09:52:40] <R2E4> I am going to install linuxcnc today.
[09:53:00] -!- mhaberler has quit [Ping timeout: 276 seconds]
[09:53:10] <Jymmm> R2E4: Run the latency test from the LiveCd BEFORE you install
[09:53:37] <R2E4> I haven't used lnux since slackware 1.1 kernel so it might be interesting......
[09:54:12] <Jymmm> R2E4: Not all mobos can be used. and ost all laptops can NOT be used, though many try.
[09:54:22] <Jymmm> s/ost/most/
[09:54:49] <R2E4> I will get a box that will work. If I dont have one I will get one.
[09:55:40] <R2E4> Will the latency test give me a yah or nay or just a number?
[09:56:01] <Jymmm> a number, and run it for a minimum of 24 hours.
[09:56:35] <Jymmm> load up the machine, run everything, you want to kick the tires heavily
[09:57:08] <R2E4> Do I need to have the mesa cards in it or is this strickly to test the mobo etc...?
[09:57:17] <Jymmm> just the mobo
[09:57:38] <cncbasher> R2E4:
http://wiki.linuxcnc.org/uploads/Title_Sheet.pdf
[10:00:18] <R2E4> COOL, thanks...
[10:00:48] <R2E4> I will have to read up on the mesa stuff tomake sure it willdrive my servo's and understand the encoders.
[10:01:04] <R2E4> But that is a great step inthe right direction cncbasher
[10:01:14] <R2E4> thanks
[10:02:04] -!- jdh has quit [Read error: Operation timed out]
[10:03:39] <R2E4> so coming out of the 7i33TA's, is the servo amps and the encoders. So these boards handles the loop to close it or is that linuxcnc?
[10:03:44] <cncbasher> R2E4: the only point to clarify is if the servo motors are using encoders or resolvers
[10:04:00] <R2E4> they are encoders.
[10:04:26] <cncbasher> that will denote if a addon card is needed ,
[10:04:31] <R2E4> not very high resolutino I might add.
[10:04:45] <R2E4> resolution
[10:05:36] -!- R2E4_ [[email protected]] has joined #linuxcnc
[10:06:37] <cncbasher> linuxcnc handles the closed loop , the mesa cards is the interface between them
[10:06:38] -!- JT-Shop has quit [Read error: Connection timed out]
[10:06:50] <R2E4_> gotcha
[10:07:00] <Jymmm> R2E4:
http://www.youtube.com/watch?v=2E3PMooch1k
[10:07:34] -!- JT-Shop [[email protected]] has joined #linuxcnc
[10:08:24] <Jymmm> R2E4:
http://electronicsam.com/images/KandT/conversion/panel/electricalbox.jpg
[10:08:34] <R2E4_> Is that a 4th axis doing that tapping?
[10:08:47] <R2E4_> 1" that fast.... impressive
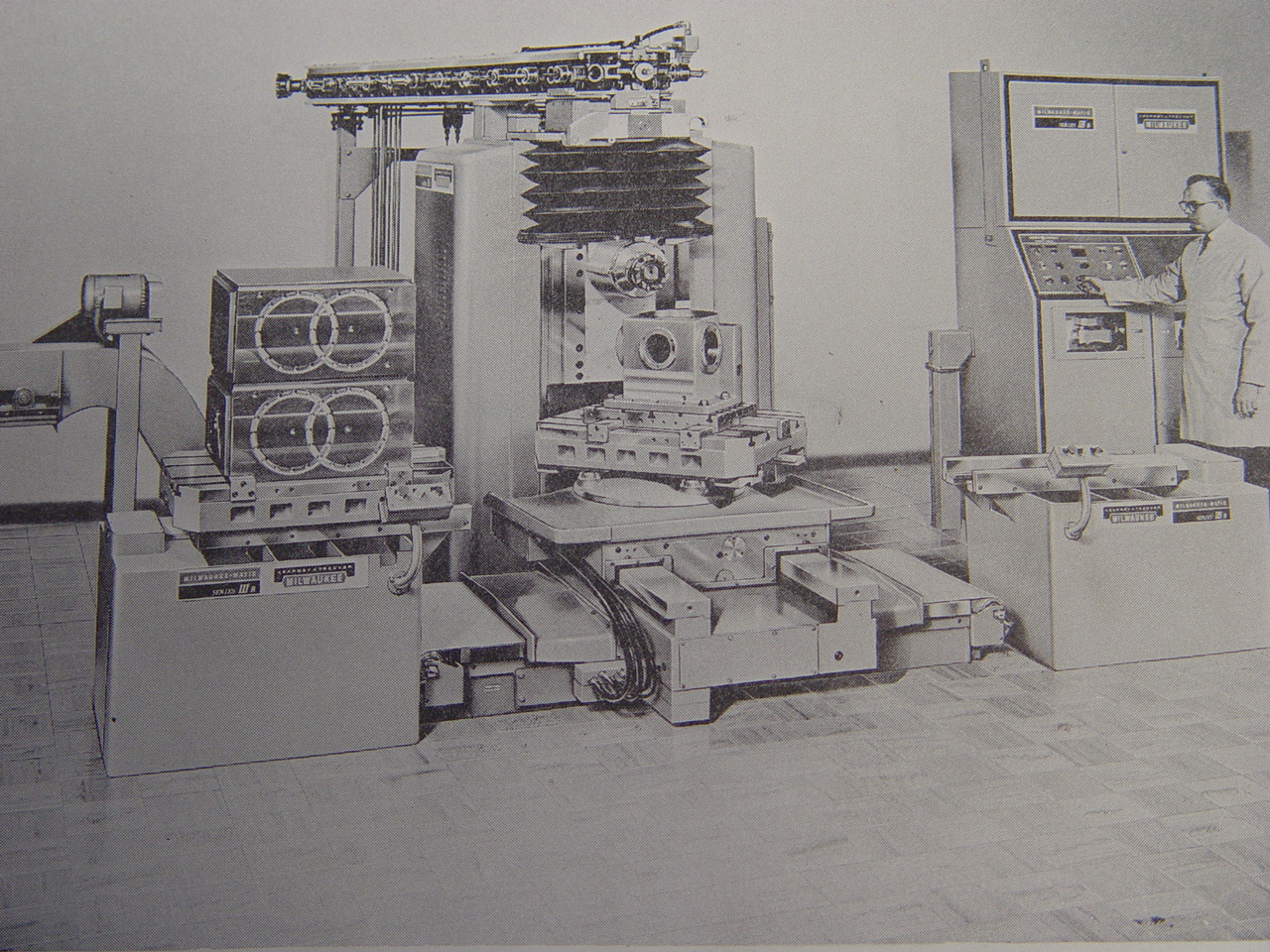
[10:09:46] <Jymmm> http://electronicsam.com/images/KandT/oldkandt.JPG
[10:10:02] <Jymmm> It's like 8ft tall
[10:11:58] <R2E4_> jesus.... That thing is lethal
[10:12:03] <Jymmm> http://www.youtube.com/watch?v=Kh4YD0d071c
[10:12:28] <Jymmm> http://www.youtube.com/user/samcoinc/videos
[10:13:03] <Jymmm> skunkworks: you need to take video zoomed out
[10:14:00] <Jymmm> http://www.youtube.com/watch?v=CYA5uEwLSTA
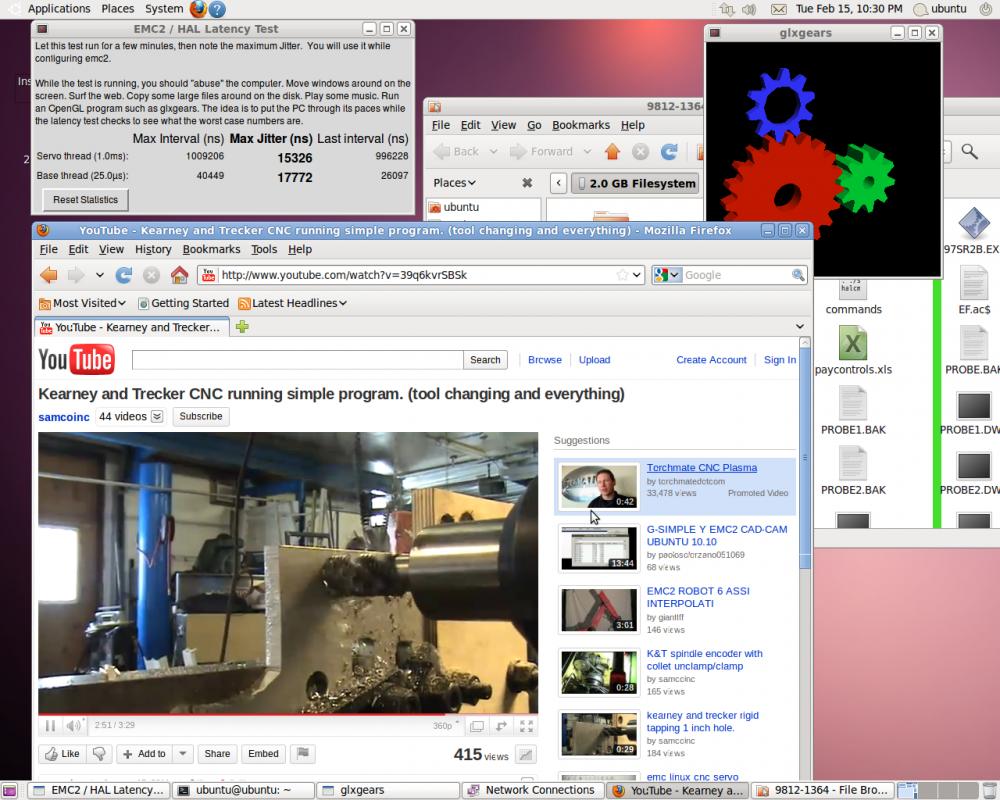
[10:17:33] <Jymmm> R2E4: latency test running in the TL corner
http://www.electronicsam.com/images/KandT/testing/asus%20m2n68-am%20plus%20motherboard%20with%20amd%20phenom%20x4%209600b%20%28quad%20core%202.3ghz%29.jpg
[10:19:45] <R2E4_> how many tools do you need to be able to use? haha damn!
[10:20:55] <R2E4_> latency test not found
[10:21:24] <Jymmm> R2E4: CNC Pr0n (not linuxcnc), LOTS-O-TOOLS
http://www.youtube.com/watch?v=A_qHR_H_2cg
[10:22:05] <Jymmm> like 85-150 tools iirc
[10:23:36] -!- gmag [[email protected]] has joined #linuxcnc
[10:24:58] <R2E4_> wow. I want one of those.
[10:25:32] <cncbasher> R2E4:
http://igor.chudov.com/projects/Bridgeport-Series-II-Interact-2-CNC-Mill/
[10:25:46] <Jymmm> R2E4: Talk to your electric company first.
[10:26:37] <cncbasher> anyone have plans for a diy power station
[10:26:53] <Jymmm> cncbasher: yes
[10:27:04] <R2E4_> I'd hate to be the guy that had to program that CTX gamma 2000.
[10:27:33] <Jymmm> cncbasher: or do you mean like blueprints?
[10:27:46] <Jymmm> CAD files, etc
[10:28:35] <cncbasher> yea the way things are going in the UK we wont have enough electric to run
[10:29:05] <cncbasher> anything , the way the cost is rising
[10:29:24] <Jymmm> is it imported?
[10:29:32] <R2E4_> same SEM motors on mine.
[10:30:40] <cncbasher> R2E4_: sem are common motors on a bridgeport
[10:31:01] <Jymmm> cncbasher: Heh, you need to harness the power of FOG!!!
[10:31:25] <archivist> cncbasher, I have a 6 cyl deseasal generator resting and waiting for use :) 60A 3 phase
[10:31:27] <cncbasher> keep the origional servo drives if they are working , makes for a simple conversion with mesa cards
[10:31:58] <cncbasher> archivist> i have a long extension lead
[10:33:06] <R2E4_> then just change the controller?
[10:33:38] <R2E4_> otherwise I would need servo amps...........
[10:33:44] <cncbasher> R2E4_ : yes thats all you need
[10:35:23] <R2E4_> that interact didn't look bad at all. Electronics I mean.
[10:35:23] <Jymmm> cncbasher: Make like a giant version of this, then use the weight of the rainfall to "squeeze it" =)
https://www.youtube.com/watch?v=_N5QBoE1Zxs
[10:35:44] <cncbasher> R2E4:use mesa 5i25 pci card and the servo addon card and gpio pendant card perhaps and your done
[10:37:18] <Jymmm> cncbasher: OH, stack and cascasde them... water in the first, empties into the next, etc.
[10:37:42] <cncbasher> Jymmm: i''l just have the wife pedal the bike , whilst i'm milling
[10:38:05] <Jymmm> cncbasher: there ya go =)
[10:38:27] -!- JesusAlos [[email protected]] has joined #linuxcnc
[10:38:34] <Jymmm> cncbasher: what about a wind generator?
[10:38:34] <cncbasher> jymmm: might make her feel useful .. hehehe
[10:38:49] <JesusAlos> hi
[10:39:31] <Jymmm> cncbasher: If we had as much rainfall as you guys do, and had the land, I'd try the squeeze thing.
[10:40:05] <Jymmm> cncbasher: They does those for real using a water tank on a hill.
[10:43:04] -!- dhoovie has quit [Read error: Connection reset by peer]
[10:47:12] -!- taf [[email protected]] has joined #linuxcnc
[10:57:17] -!- mhaberler [[email protected]] has joined #linuxcnc
[11:03:00] -!- motioncontrol [motioncontrol!~io@host20-119-dynamic.182-80-r.retail.telecomitalia.it] has joined #linuxcnc
[11:08:21] -!- JesusAlos has quit [Quit: ChatZilla 0.9.90 [Firefox 11.0/20120310193829]]
[11:14:35] <mrsun_> hmm need to make a longer screw for the tailstock i think
[11:14:52] <mrsun_> if i put a dead center in there i have to unthread it all, pull it out and push it out with a tool :P
[11:15:07] -!- mhaberler has quit [Remote host closed the connection]
[11:15:21] -!- mhaberler [[email protected]] has joined #linuxcnc
[11:26:59] <mrsun_> hehe china machine screws are a joke :P
[11:27:12] <mrsun_> stripped the threads off one without any effort
[11:31:21] -!- ttuner [[email protected]] has joined #linuxcnc
[11:34:52] -!- ttuner has quit []
[11:35:53] <jthornton> archivist, I got to use my 15kW generator Thursday during the ice storm
[11:36:29] <archivist> mine has been resting for many years
[11:36:48] <archivist> needs a battery
[11:37:11] <cncbasher> archivist:time to give it a clean and use it
[11:37:30] <archivist> the fuels costs enough!
[11:38:02] <jthornton> mine is a 2 cylinder Deutz air cooled diesel
[11:38:17] <archivist> we used to use it as a museum for site power for a number of years, the whip round for fuel money was fun
[11:38:57] <archivist> I have a Perkin6 6.354 on mine 100hp ish
[11:39:09] <archivist> Perkins
[11:39:28] <jthornton> that would be hard to hand crank
[11:40:00] <jthornton> a hydraulic starter would be better than a battery starter for a back up generator IMHO
[11:40:31] <archivist> fun was when it would run out while a person was in a boiler flue needle gunning the rust, poor bugger has to get out in the pitch black
[11:41:21] <jthornton> I used to hate when the needle gunners worked near me in the shipyard
[11:41:32] <roh> is the grid really that unreliable where you are that spare diesel generators are in order?
[11:41:43] -!- Wildhoney has quit [Ping timeout: 256 seconds]
[11:41:55] <archivist> americans need backup power :)
[11:42:14] <Jymmm> jthornton: hydralic starter?
[11:42:45] <jthornton> yes, the grid is for the most part on overhead lines and I live in a forest...
[11:42:57] -!- syyl [[email protected]] has joined #linuxcnc
[11:43:11] <Jymmm> jthornton: what is a hydraulic starter?
[11:43:13] <jthornton> Jymmm, yes a common thing for diesel engine
[11:43:46] <Jymmm> hand pumped hydraulics?
[11:43:46] <archivist> or a spinning flywheel on a no-break gen set
[11:43:56] <jthornton> a hand pump, a hydraulic motor an accumulator, and a lever
[11:44:01] <Jymmm> ah
[11:44:14] <Jymmm> Just never heard of such a thing.
[11:44:21] <jthornton> if the accumulator is pressured up you just kick the lever to start the motor
[11:44:34] <jthornton> if not you pump your ass off then kick the lever
[11:44:42] <Jymmm> heh
[11:44:53] <roh> hydraulic starters seem fancy
[11:44:57] <archivist> also a lot have air start
[11:45:00] <jthornton> I know Detroit Diesel had them
[11:45:06] -!- syyl_ has quit [Ping timeout: 264 seconds]
[11:45:14] <roh> just i guess its the same amount of work to maintain them like its for batteries
[11:45:18] <jthornton> the EMD
[11:45:18] <Jymmm> and hope it starts the first time?
[11:45:24] <jthornton> 's had air starters
[11:45:27] * Loetmichel hat compressed aur starters on the Diesel engine at the navy
[11:45:29] <jthornton> yep
[11:45:46] <Loetmichel> 3500 HP 16 cyl turbodiesels
[11:45:53] <Loetmichel> air
[11:46:21] <Loetmichel> 2 engines, 2 "cans" with 120 liters 60 bar compressed air each.
[11:46:26] <roh> i guess batteries are easier to maintain without proper training. every car mechanic knows such stuff. hydraulic starters only people know who work on big engines
[11:46:35] <Loetmichel> just enough for 3 start-trials
[11:46:47] <archivist> I used to play with a Brush opposed twin with air start and a 3 ton flywheel on it
[11:47:23] <Loetmichel> if these failed: go in the stern of the ship, handcrank the 2 cyl 10hp diesel air compressor to life, wait 2 hrs ;-)
[11:47:31] <Jymmm> roh: I'm hearing more and more ppl are installing lil solar panels on their rarely used gear to maintain the battery making it last 3+ years
[11:47:52] <jthornton> the hydraulic starters were on 12 cylinder engines, not so big about 4' tall or so and 8' long V12's
[11:47:54] <Jymmm> roh: tractors, snow mobiles, riding mowers,e tc
[11:49:15] <roh> Jymmm: thats an option if you got them standing outside all the time
[11:49:30] <Jymmm> long cable
[11:49:44] <roh> then you can also hook em up to the grid
[11:50:27] <Jymmm> nah, no fun in that
[11:51:10] <Jymmm> Heh, diesel MC
http://www.dieselbike.net/privateproduction/dieselchopper.jpg
[11:51:27] <roh> dont get me wrong.. i like solar. but it think its a sign of wrong thinking if one only uses it to maintain batteries used to start gas guzzlink gear
[11:51:53] <Jymmm> as opposed to what?
[11:51:54] <roh> so i'd rather see solar powering a local grid which you can also hook up battery chargers to
[11:52:24] <Jymmm> I'd rather get OFF THE GRID =)
[11:52:35] <Jymmm> under the radar too =)
[11:58:41] -!- jdh [[email protected]] has joined #linuxcnc
[12:00:18] -!- Thetawaves has quit [Remote host closed the connection]
[12:00:52] -!- R2E4_ has quit [Ping timeout: 248 seconds]
[12:00:52] -!- R2E4 has quit [Ping timeout: 248 seconds]
[12:02:22] -!- Thetawaves [[email protected]] has joined #linuxcnc
[12:24:30] <jthornton> pcw_home, do you have a link for a 7i77 sample ini file too?
[12:37:26] <jthornton> pcw_home, nevermind cncbasher found it on my web site
[12:38:12] -!- adb has quit [Ping timeout: 256 seconds]
[13:10:39] -!- Icekiller has quit [Read error: No route to host]
[13:24:40] -!- skorasaurus has quit [Quit: left the building.]
[13:39:52] -!- theorbtwo has quit [Read error: Connection reset by peer]
[13:40:28] -!- syyl_ws [[email protected]] has joined #linuxcnc
[13:41:34] -!- theorbtwo [[email protected]] has joined #linuxcnc
[13:41:51] -!- ravenlock [ravenlock!~ravenlock@enlightenment/developer/ravenlock] has joined #linuxcnc
[13:43:32] <Loetmichel> hmmm, can anyone give me a tip how to display the CPU temp in LinuxCNC-ubuntu 10.04?
[13:43:55] <Loetmichel> the HDD i got, but the tool doesent show the CPU as sensors. somewhere i have mised something
[13:44:06] <cncbasher> see the wiki i'm sure theirs an example
[13:46:28] <Loetmichel> seen none. do you have a link to the specific wiki page? maybe i should search better ;-)
[13:46:50] <cncbasher> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?ContributedComponents#Motherboard_Sensors
[13:48:33] <Loetmichel> wrong end
[13:49:15] <Loetmichel> i dont want to see them in linuxCNC, just in the title bar of Gnome. but the acpi sensost doesent show, so the .py will not help
[13:50:06] <cncbasher> ok understand now
[13:50:33] <Loetmichel> the only sensor the sensor applet can see is the HDD
[13:51:10] <cncbasher> what cpu and motherboard are you using
[13:51:25] <Loetmichel> core2duo 2.53 ghz
[13:52:06] <Loetmichel> and a Kontron kt965/flex
[13:53:10] <cncbasher> have you try'd using lm-sensors ?
[13:53:33] <Loetmichel> it is installed iirc
[13:54:21] <cncbasher> no
[13:54:43] <cncbasher> sudo apt-get install lm-sensors sensors-applet
[13:55:18] <cncbasher> the other i am aware of is computertemp
[13:55:26] <Loetmichel> done that a while ago
[13:57:22] <cncbasher> http://www/lm-sensors.org
[13:58:08] <Loetmichel> hmmm... just run the sensors-detect-script ... CNC rebooting... lets see...
[13:58:29] <cncbasher> http://www.lm-sensors.org/
[13:59:05] <Loetmichel> its not like i NEED thos temps, but as the lid of the pizzabox is 2mm abvove the coufan i feel safer to see the temps ;-)
[13:59:23] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=12265
[13:59:28] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=12250
[13:59:34] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=12247
[13:59:39] <cncbasher> yea it's close
[13:59:46] <Loetmichel> its a BIT crammed inside there ;-)
[14:00:22] <Loetmichel> ha, FINE.... sensords-detect did the trick
[14:01:21] <cncbasher> great
[14:02:49] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=14061
[14:03:02] <Loetmichel> .... note to self: installing is sometimes not enough ;-)
[14:04:07] <cncbasher> glad u have it all working
[14:06:18] <Loetmichel> thanks
[14:06:48] <Loetmichel> now i just have do dismaltle the CNC bcause one of the couplers is slipping.. (y axis) :-(
[14:07:52] -!- mattions has quit [Ping timeout: 252 seconds]
[14:07:53] <Loetmichel> should make me some new ones from aluminium, the POM ones are not as sturdy as thought, had to repair the x coupler some time ago as well :-( ->
http://www.cyrom.org/palbum/main.php?g2_itemId=12563
[14:07:59] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=12566
[14:09:01] <cncbasher> yes cant beat aluminium ones
[14:09:56] -!- taf has quit [Ping timeout: 248 seconds]
[14:11:59] <Loetmichel> i am a bit shy of aluminium for the couplers because of the bending that occurs, dont the alu weaken over time?
[14:12:38] <Loetmichel> or should i use this style:
http://www.cyrom.org/palbum/main.php?g2_itemId=12846 ?
[14:13:03] <cncbasher> if your shafts are central and axialy in line you should not have any problem
[14:13:13] <cncbasher> iv'e never had one break
[14:13:38] <Loetmichel> ok...
[14:14:20] <cncbasher> if you have a slight difference in axial direction then the last one would be better
[14:14:52] <cncbasher> but i have some huge ones on 3 machines and never had a problem
[14:15:04] <Loetmichel> then i will tighten the y coupler and begin to make some youplers wit the slots in it from aluminimum rod... $me is searching for his mini saw blade and mount for the spindle ;-)
[14:15:09] <cncbasher> there 100mm long and 50mm dia
[14:15:28] <Loetmichel> mine are a lot smaller
[14:16:00] <Loetmichel> about 16mm dia and 40mm long
[14:16:10] <Loetmichel> its a small machine, also ;-)
[14:16:19] <cncbasher> dont worry they will be fine
[14:16:27] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=14043
[14:16:45] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=14040
[14:25:01] -!- ktchk [[email protected]] has joined #linuxcnc
[14:26:56] -!- gmag has quit [Ping timeout: 255 seconds]
[14:27:00] -!- Tom_itx has quit [Ping timeout: 256 seconds]
[14:27:36] -!- sumpfralle [[email protected]] has joined #linuxcnc
[14:28:18] -!- Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #linuxcnc
[14:30:35] -!- b_b has quit [Changing host]
[14:55:27] -!- rizo [[email protected]] has joined #linuxcnc
[14:57:23] -!- zzolo has quit [Quit: zzolo]
[15:03:19] -!- jensor [jensor!47b37591@gateway/web/freenode/ip.71.179.117.145] has joined #linuxcnc
[15:05:13] <jensor> I've found a solution to fixing the problem of one axis limiting the velocity on a single axis G0 call.
[15:05:59] <jensor> Just configure the fastest axis as [AXIS_0]
[15:06:28] <jensor> Because that axis limits the others
[15:14:39] <archivist> that looks like a bug
[15:16:15] -!- gmag [[email protected]] has joined #linuxcnc
[15:16:43] <skunkworks> I have not run into that. I know that the K&T has its max velocity as sqr(x^2+y^2+z^2)
[15:19:18] <Jymmm> log(r2d2^c3p0)
[15:19:25] quiron is now known as Guest94875
[15:21:54] <Jymmm> skunkworks: How did you determine that?
[15:34:23] <skunkworks> because that is what I calculated - if all axis are moving at max velocity - its combined velocity is sqr(x^2+y^2+z^2)
[15:34:44] <rizo> i would like to control linear bldc motor using bldc.comp. I configured the hal so that i can home the motor. The problem is that when i set the bldc. value to some max value, the motor does not accelerate, but just stays still. If i print the bldc.output i can see the 90deg lag between the phase angle and rotor angle. Why is the motor not moving than?
[15:35:25] <Jymmm> skunkworks: So that's basically theoretical, not actually one axis being slower than the others?
[15:35:27] <rizo> The motor stays still with the current set to maxvalue.
[15:38:15] <skunkworks> well - linuxcnc when G0'ing - is showing correctly
[15:41:17] <Jymmm> skunkworks: k
[15:44:54] -!- AR_ [[email protected]] has joined #linuxcnc
[15:48:21] -!- cpresser [[email protected]] has joined #linuxcnc
[16:03:51] -!- zlog has quit [Remote host closed the connection]
[16:03:56] -!- Tom_itx has quit []
[16:05:12] -!- Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #linuxcnc
[16:05:17] -!- zlog [[email protected]] has joined #linuxcnc
[16:08:15] -!- kwallace [[email protected]] has joined #linuxcnc
[16:19:59] <cradek> I can't reproduce that problem and I replied on the forum saying exactly what I did to test it.
[16:20:48] <cradek> I did not try stepper because I do not have realtime here. but if it was a stepper maxvel setting problem, you'd get an ferror right away.
[16:21:47] <skunkworks> my thoughts exactly
[16:21:52] -!- taf [[email protected]] has joined #linuxcnc
[16:22:22] <skunkworks> his ini and hal file look ok - It seems as if the max velocity setting in the traj section isn't being read.
[16:23:17] <cradek> someone in the forum suggested maybe he isn't running the config he thinks he is. I've done that. it might be some silly problem like that...?
[16:24:20] <cradek> trying to reproduce it in sim, making minimal changes to one of the sim configs shipped with 2.5.1, would be a great idea
[16:27:59] -!- FinboySlick [[email protected]] has joined #linuxcnc
[16:32:43] <r00t4rd3d> cradek, will you code up a android app that streams linuxcnc's preview window with a estop button?
[16:32:44] <r00t4rd3d> :)
[16:34:05] <r00t4rd3d> probably do that with mini emc2 i guess
[16:35:11] <cradek> no, I won't. I only use my powers for good, never for evil.
[16:35:20] <cradek> (and only occasionally for silly)
[16:35:24] <JT-Shop> lol
[16:35:57] <Jymmm> cradek: He said andriod, not iPhone
[16:37:24] <r00t4rd3d> http://code.google.com/p/miniemc2/wiki/PageName
[16:37:59] <pcw_home> rizo: this probably means you have an error with commutation (commutation angle should lead/lag magnetic null by 90 degrees depending on sign of BLDC input)
[16:40:32] <Jymmm> pcw_home: Please rephrase your last statement in a geek format
[16:40:41] -!- Brandonian has quit [Quit: Brandonian]
[16:42:49] <Jymmm> Why would aluminum welds be painted?
[16:44:32] <r00t4rd3d> hide the cracks
[16:45:23] <Jymmm> I picked up a 6ft section of datacenter cable management railing (kinda looks like a ladder hanging horizontally from the ceiling) and where the "rungs" are welded to the channel it's painted, but nowhere else.
[16:45:53] <r00t4rd3d> black?
[16:45:59] <Jymmm> no, silver
[16:48:42] -!- ktchk has quit [Read error: Connection reset by peer]
[16:48:43] -!- motioncontrol has quit [Read error: Connection reset by peer]
[16:50:05] -!- motioncontrol [motioncontrol!~io@host20-119-dynamic.182-80-r.retail.telecomitalia.it] has joined #linuxcnc
[16:51:30] -!- taf has quit [Ping timeout: 260 seconds]
[16:51:46] <r00t4rd3d> probably just anodized
[16:52:35] -!- taf [[email protected]] has joined #linuxcnc
[16:54:09] <r00t4rd3d> see if some will scrap off with a knife
[16:54:27] -!- R2E4 [[email protected]] has joined #linuxcnc
[16:54:35] <R2E4> Hey guuys....
[16:54:40] <r00t4rd3d> if it dont, its anodized
[16:55:20] <R2E4> Will a 1.8ghz 2core 2 gig ram computer work ok with linuxcnc?
[16:55:37] <r00t4rd3d> need more info then that
[16:56:08] <r00t4rd3d> i got an android tablet with those specs
[16:56:32] <skunkworks> R2E4: yes - if it performs well with realtime
[16:57:03] <skunkworks> throw the livecd in it and test
[16:57:29] <r00t4rd3d> R2E4, are you looking at buying one or getting a old one going?
[16:57:40] <R2E4> yeah, I'm downloading now but I dont thinki it is the live cd....hehe
[16:58:31] <rizo> pcw_home, can i somehow offset the rotor angle? I am using software commutation.
[16:58:31] <R2E4> I just aquired a BP cnc series 1 R2E4
[16:58:42] <R2E4> eBOSS 9
[16:59:24] <R2E4> The iso from the site....IS that the live CD?
[16:59:29] <skunkworks> http://www.linuxcnc.org/index.php/english/download
[16:59:29] <r00t4rd3d> ya
[17:00:05] <skunkworks> R2E4: I don't know my BP's - is that servo or stepper?
[17:00:15] <R2E4> servo's
[17:00:23] <skunkworks> nice - what are your plans?
[17:00:51] <R2E4> well, sell the house, change girdfriends and build a lotus 7.
[17:01:07] <R2E4> hehe...
[17:01:31] <r00t4rd3d> whats a lotus 7?
[17:01:55] <R2E4> Going to strip the cab, use linuxcnc with the mesa cards I think. I need the error correcting feedback. HAve a 5,000 part job coming up I dont want to miss out on.
[17:02:04] <Jymmm> r00t4rd3d: a car
[17:02:08] <r00t4rd3d> oh
[17:02:23] -!- mhaberler has quit [Quit: mhaberler]
[17:02:40] <Jymmm> r00t4rd3d: For the seriously NOT well endowed
[17:02:41] <R2E4> http://super7cars.ca/
[17:03:17] <R2E4> Maybe keep the amps if they are working.
[17:03:18] <rizo> pcw_home, i am using bldc cfg=qi settings. I checked the bldc.comp and there is no such input.
[17:03:50] <rizo> ...to change the commutation angle.
[17:05:20] <R2E4> Will it use a standard post proc? I allready have my CAM and want to make sure I wil beable to use it.
[17:06:40] <skunkworks> R2E4: great - mesa is awesome
[17:09:33] <Tom_itx> mesa is so good it should be illegal
[17:11:08] <cpresser> mesa cured my cancer
[17:11:39] <Jymmm> mesa gave me cancer and 3 STD's
[17:12:39] <cpresser> you need to clean the contacts first bevor inserting the card, Jymmm
[17:13:09] <R2E4> Their slogan should be
[17:13:17] <R2E4> "don't MESA with me!!!"
[17:13:48] <Jymmm> cpresser: Hey now, didn't they teach not to have unprotected mesa insertion
[17:15:23] <r00t4rd3d> http://i.imgur.com/6sv7EO7.jpg
[17:15:25] <r00t4rd3d> thats cool
[17:16:46] <R2E4> MESA with me and I will MESA you up!!!
[17:17:55] <R2E4> Thats a cool table. Did you make it?
[17:18:06] -!- jpk has quit [Ping timeout: 264 seconds]
[17:18:20] <r00t4rd3d> no
[17:18:24] -!- tjtr33 [[email protected]] has joined #linuxcnc
[17:19:31] <r00t4rd3d> I could make one though
[17:19:59] <r00t4rd3d> if i had a shit ton of scrap steel and a powered bandsaw
[17:20:18] <r00t4rd3d> metal bandsaw
[17:23:15] -!- Oo_BIGeye has quit [Ping timeout: 244 seconds]
[17:23:31] -!- Oo_BIGeye [[email protected]] has joined #linuxcnc
[17:24:59] -!- JesusAlos [[email protected]] has joined #linuxcnc
[17:25:29] <cncbasher> R2E4:gnipsel.com/linuxcnc/configs/index.html
[17:26:08] <cncbasher> R2E4:see 7i77 config
[17:27:56] <JesusAlos> hi
[17:31:23] <pcw_home> rizo bldc.N.drive-offset maybe
[17:31:25] <pcw_home> does the QI mode move the carriage at startup? (it should)
[17:32:15] <R2E4> ah cool.
[17:34:04] <rizo> pcw_home, there is no such input
[17:35:26] <rizo> maybe i should use angle and value and feed the crafe fith ofset?
[17:35:39] <rizo> maybe i should use angle and value and feed the crake with offset?
[17:36:41] <pcw_home> I copied that from the manual...
[17:38:23] <pcw_home> thatres also bldc.N.lead-angle (default 90 is probably correct for your drives)
[17:38:41] <pcw_home> s/thatres/theres/
[17:38:53] <rizo> i see... thank you
[17:39:04] <rizo> yes, i think 90 is ok
[17:40:34] <pcw_home> to get qi mode to work the motor needs to do a homing move at startup (initiated by rising edge of bldc.N.init)
[17:41:51] <rizo> i have this and it works fine
[17:41:55] <pcw_home> bldc.N.initvalue must be set to somthing reasonable for this to happen
[17:43:07] <pcw_home> then there mus be some offset to tell BLDC the index offset from rotor position (bldc.N.drive-offset i think)
[17:43:48] <pcw_home> well s/rotor/carriage/
[17:52:55] -!- taf_ [[email protected]] has joined #linuxcnc
[17:53:20] -!- taf has quit [Ping timeout: 260 seconds]
[17:53:22] -!- IchGuckLive [[email protected]] has joined #linuxcnc
[17:53:29] <IchGuckLive> hi all B)
[17:53:35] taf_ is now known as taf
[17:56:03] -!- motioncontrol has quit [Quit: Sto andando via]
[17:58:45] emk_ is now known as emk
[18:03:42] <pcw_home> Damn Daisey got the vacuum cleaner cord _again_
[18:10:07] <IchGuckLive> Daisey Duck does a clean up her self ?
[18:10:32] -!- jfire has quit [Quit: Leaving.]
[18:16:19] <pcw_home> Daisey rabbit destroys the vaccum cleaner cord if I get distracted (like with IRC) when vaccuming the excercise pen
[18:17:28] <IchGuckLive> LOL i found this morning rabbit footprints in the snow around the house maybe not enoph food in the forast as it is now 9weeks on snow
[18:20:08] <pcw_home> No wild rabbits around town (brush rabbits and jack rabbits (really hares) in the hills though)
[18:23:10] -!- Cylly [[email protected]] has joined #linuxcnc
[18:24:48] -!- Loetmichel has quit [Ping timeout: 264 seconds]
[18:25:57] <IchGuckLive> pcw_home: what are ack rabbits
[18:26:07] -!- b_b has quit [Changing host]
[18:26:09] <IchGuckLive> jack i cant find a translation
[18:27:29] <pcw_home> http://en.wikipedia.org/wiki/Black-tailed_jackrabbit is what we have around here
[18:28:13] <IchGuckLive> ah i see lng ears
[18:29:20] -!- zzolo has quit [Client Quit]
[18:32:04] <IchGuckLive> B) O.O and the oscar goes 2 a big event to come !
[18:32:27] <IchGuckLive> no milling oscar the people that mantain the stuff are off !
[18:34:33] -!- kwallace1 [[email protected]] has joined #linuxcnc
[18:36:20] -!- stsydow has quit [Ping timeout: 255 seconds]
[18:36:20] -!- kwallace has quit [Ping timeout: 255 seconds]
[18:36:27] <R2E4> latency test: servo thread 260711 base thread 227554 are thes good enough?
[18:36:57] -!- mhaberler [[email protected]] has joined #linuxcnc
[18:39:59] <JT-Shop> good enough for?
[18:40:02] <IchGuckLive> R2E4: shit
[18:40:11] <IchGuckLive> SMI
[18:40:26] <IchGuckLive> did you reset
[18:40:41] <IchGuckLive> and look for a jump every 15sec
[18:42:13] <IchGuckLive> R2E4: ?
[18:42:45] <ReadError> holy fail
[18:42:53] <IchGuckLive> this also sems to be on a livecd not a full instalation on this numbers
[18:43:27] <IchGuckLive> if never seen sutch high numbers on a realtime
[18:43:30] <R2E4> ah,, I se it is suppose to be under 100,000
[18:43:32] <R2E4> hehe
[18:43:37] <R2E4> not good.
[18:43:45] <IchGuckLive> what pc is it
[18:43:52] <IchGuckLive> mainboard
[18:44:09] <JT-Shop> under 10,000 is great
[18:44:21] <R2E4> IBM Lenova brick. 1.8 ghz 2 core 2 gig ram
[18:44:37] <R2E4> let me check mobo.
[18:44:40] <IchGuckLive> so did you get the SMI
[18:44:55] <R2E4> I haveanoither Ic an check.
[18:45:15] <IchGuckLive> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?FixingSMIIssues
[18:45:32] <IchGuckLive> ibm has always SMI as i use A50
[18:46:02] <IchGuckLive> R2E4: where are you from USA Europ
[18:47:03] <R2E4> Canada
[18:47:33] <IchGuckLive> i use ibm mashines on all my 120+ mashines
[18:48:30] <IchGuckLive> im in germany
[18:48:42] <IchGuckLive> its late here !
[18:48:53] <R2E4> So how do I turn of the SMI?
[18:49:02] <IchGuckLive> see the linnk
[18:49:17] <IchGuckLive> are you on lucid 10.04
[18:51:34] <IchGuckLive> type -> cat /etc/*release <- in a terminal please
[18:52:20] <IchGuckLive> but i guess you got the latest livecd and so you are on 2.5.0
[18:53:27] <IchGuckLive> JT-Shop: im off get him more help !
[18:53:46] <IchGuckLive> By folks :D
[18:53:52] -!- IchGuckLive has quit [Quit: ChatZilla 0.9.87 [Firefox 18.0/20130108033621]]
[18:53:55] <R2E4> yeah I got the latest
[18:58:48] Cylly is now known as Loetmichel
[19:01:21] -!- sumpfralle has quit [Ping timeout: 256 seconds]
[19:05:07] <R2E4> Will an AMD64 work ok?
[19:05:24] -!- Tecan has quit [Ping timeout: 252 seconds]
[19:07:01] <L84Supper> AMD64 is fine
[19:07:04] -!- Tecan [Tecan!~fasdf@unaffiliated/unit41] has joined #linuxcnc
[19:11:31] -!- taf_ [[email protected]] has joined #linuxcnc
[19:12:53] <R2E4> much easier to change copmputers than recompile the kernel.
[19:13:14] -!- taf has quit [Ping timeout: 255 seconds]
[19:13:26] taf_ is now known as taf
[19:14:14] -!- Thetawaves_ [[email protected]] has joined #linuxcnc
[19:20:05] <R2E4> servo thread 31761 base thread 138673 thats much better huh?
[19:23:55] -!- stsydow has quit [Ping timeout: 246 seconds]
[19:31:08] -!- tjtr33 [[email protected]] has parted #linuxcnc
[19:39:47] -!- jfire has quit [Quit: Leaving.]
[19:40:05] -!- Nick001-Shop [[email protected]] has joined #linuxcnc
[19:45:01] <pcw_home> better but still pretty poor for sofware s stepping (say about 4 KHz max)
[19:45:03] <pcw_home> so 120 RPM on a gecko (10 usteps) 600 RPM on a 1/2 step drive
[19:47:42] -!- r00t4rd3d has quit [Quit: Leaving]
[19:51:08] -!- r00t4rd3d [r00t4rd3d!~r00t4rd3d@unaffiliated/r00t4rd3d] has joined #linuxcnc
[19:52:00] -!- adb [[email protected]] has joined #linuxcnc
[20:01:57] -!- Thetawaves_ has quit [Quit: This computer has gone to sleep]
[20:05:06] -!- AR_ has quit [Read error: Connection reset by peer]
[20:08:14] -!- taf_ [[email protected]] has joined #linuxcnc
[20:10:08] -!- taf has quit [Ping timeout: 252 seconds]
[20:10:09] taf_ is now known as taf
[20:12:39] -!- Brandonian has quit [Quit: Brandonian]
[20:14:30] <Tom_itx> anybody know when andy is due back?
[20:14:58] <Tecan> http://openartisthq.org/ dam fine distro
[20:15:16] <Tecan> great for vm
[20:25:11] -!- jfire has quit [Quit: Leaving.]
[20:29:42] -!- syyl_ws has quit [Quit: Verlassend]
[20:47:13] -!- zzolo has quit [Quit: zzolo]
[20:50:57] <R2E4> After its installed, should I do all the updates?
[20:51:13] -!- taf has quit [Ping timeout: 256 seconds]
[20:51:32] <Tom_itx> of course
[20:51:59] <pcw_home> no kernel updates though...
[20:57:02] <R2E4> 166 packages
[20:58:24] -!- mattions has quit [Quit: Leaving]
[21:01:30] -!- zlog has quit [Read error: Connection reset by peer]
[21:01:30] -!- Tom_itx has quit [Read error: Connection reset by peer]
[21:01:39] -!- linlin has quit [Remote host closed the connection]
[21:01:55] -!- linlin [[email protected]] has joined #linuxcnc
[21:07:31] -!- skunkworks has quit [Read error: Connection reset by peer]
[21:13:21] -!- Tom_itx [Tom_itx!~Tl@unaffiliated/toml/x-013812] has joined #linuxcnc
[21:13:54] -!- zlog [[email protected]] has joined #linuxcnc
[21:14:36] -!- motioncontrol [motioncontrol!~io@host32-0-dynamic.1-79-r.retail.telecomitalia.it] has joined #linuxcnc
[21:15:38] <R2E4> IT asks to restart after updates? Whats that....I thought onlywindows did that....hehe
[21:27:15] -!- skunkworks [skunkworks!~chatzilla@str-broadband-ccmts-ws-26.dsl.airstreamcomm.net] has joined #linuxcnc
[21:29:44] -!- mhaberler has quit [Quit: mhaberler]
[21:32:36] -!- R2E4 has quit [Ping timeout: 264 seconds]
[21:41:44] <r00t4rd3d> anyone watch the nascar race? They crashed in the end and a whole engine went through the fence into the crowd
[21:42:08] -!- Guest94875 has quit [Ping timeout: 245 seconds]
[21:44:55] -!- jeremyrieck [jeremyrieck!~jeremyrie@50-197-80-2-static.hfc.comcastbusiness.net] has joined #linuxcnc
[21:46:51] -!- jeremyrieck has quit [Client Quit]
[21:49:19] <Tom_itx> yeah yeah
[21:49:59] -!- johnyoutsider [johnyoutsider!~johnyouts@50-197-80-2-static.hfc.comcastbusiness.net] has joined #linuxcnc
[21:50:27] <Tom_itx> had that been an indy car the guy would have no legs now
[21:58:05] -!- kwallace1 has quit [Ping timeout: 256 seconds]
[21:58:17] -!- kwallace [[email protected]] has joined #linuxcnc
[21:59:22] -!- syyl_ [[email protected]] has joined #linuxcnc
[22:03:04] -!- syyl has quit [Ping timeout: 252 seconds]
[22:05:02] <DJ9DJ> gn8
[22:05:37] -!- DJ9DJ has quit [Quit: bye]
[22:06:19] -!- servos4ever [[email protected]] has joined #linuxcnc
[22:07:16] -!- gmag has quit [Ping timeout: 248 seconds]
[22:26:06] -!- AR_ [[email protected]] has joined #linuxcnc
[22:35:42] -!- zzolo has quit [Quit: zzolo]
[22:36:37] -!- sumpfralle [[email protected]] has joined #linuxcnc
[22:39:36] -!- motioncontrol has quit [Read error: Connection reset by peer]
[22:41:20] <AR_> lol this material that i found laying around didnt mill as nicely as i wanted it to
[22:41:21] <AR_> http://i.imgur.com/DCRzqpE.jpg
[22:42:06] <ReadError> atleast you cutting!
[22:42:13] <AR_> yea
[22:42:14] <ReadError> i moved my Y axis today on my new machine
[22:42:29] <AR_> lol
[22:42:51] <ReadError> ive had to go in to work every day this week
[22:42:56] <AR_> well it was supposed to be a limit switch mount
[22:42:57] <AR_> http://i.imgur.com/eH5sbSl.jpg
[22:43:00] <ReadError> would have been much faster if i worked at home ;/
[22:43:17] <ReadError> what material is that?
[22:43:19] <AR_> you can see where there were supposed to be two 'posts' that fit into the holes
[22:43:20] <AR_> http://i.imgur.com/v7E5NIW.jpg
[22:43:26] <AR_> i dont know lol
[22:43:33] <AR_> it's like some composite crap
[22:43:48] <ReadError> you know what cuts really nice?
[22:43:49] <ReadError> HDPE
[22:44:08] <ReadError> delrin too
[22:44:10] -!- andypugh [andypugh!~andy2@cpc16-basl9-2-0-cust685.20-1.cable.virginmedia.com] has joined #linuxcnc
[22:44:12] <ReadError> but its expensive
[22:44:19] <AR_> yeah
[22:44:52] <AR_> the surfaces got nice and smooth
[22:44:56] <ReadError> you drew any pictures?
[22:44:57] <AR_> it just ripped off those posts
[22:45:11] <AR_> lol not yet
[22:45:15] <AR_> i was going to
[22:50:06] -!- gmag [[email protected]] has joined #linuxcnc
[22:50:40] -!- bradsimantel has quit [Client Quit]
[22:54:12] -!- sumpfralle has quit [Ping timeout: 264 seconds]
[23:01:31] -!- JesusAlos has quit [Ping timeout: 260 seconds]
[23:03:34] -!- Keknom [[email protected]] has joined #linuxcnc
[23:08:47] -!- sparr has quit [Quit: KVIrc 4.2.0 Equilibrium http://www.kvirc.net/]
[23:14:28] -!- ravenlock has quit [Ping timeout: 248 seconds]
[23:18:06] <r00t4rd3d> looks like your machine is all over the place
[23:18:28] <ReadError> did you test for backlash and all?
[23:18:33] <r00t4rd3d> lol
[23:18:46] <r00t4rd3d> whats your stepover?
[23:18:49] <ReadError> that would be some hella backlash ;)
[23:19:56] <r00t4rd3d> he must have some numbers off in his setup or something
[23:20:42] <r00t4rd3d> or a .5 step over
[23:21:12] <r00t4rd3d> garbageCAM
[23:22:44] <ReadError> what cam you using AR_ ?
[23:22:55] <r00t4rd3d> i think master
[23:22:55] <ReadError> you need to step up to some real cam software r00t4rd3d :)
[23:23:37] <r00t4rd3d> i just just add the link to the topic
[23:24:28] <r00t4rd3d> AR_, how computer literate are you?
[23:24:38] <ReadError> add link to topic ?
[23:24:48] <r00t4rd3d> lol
[23:27:31] <Tom_itx> ReadError, what do you use?
[23:32:02] <ReadError> visualmill or hsmxpress
[23:32:09] <ReadError> hsmxpress is really nice for being free
[23:33:05] <Tom_itx> i wish my lathe package displayed rapid moves better
[23:33:13] <Tom_itx> i'm not sure if i trust what it tells me
[23:33:25] <Tom_itx> the mill does
[23:34:23] -!- johnyoutsider has quit [Quit: Leaving]
[23:36:49] -!- johnyoutsider [johnyoutsider!~johnyouts@50-197-80-2-static.hfc.comcastbusiness.net] has joined #linuxcnc
[23:42:08] -!- rizo has quit [Remote host closed the connection]
[23:51:24] <Jymmm> Tom_itx: "No, size doesn't matter", "I don't mind you going out with your friends on Valentines Day"
[23:51:46] -!- jensor has quit [Quit: Page closed]
[23:55:18] <AR_> <ReadError> that would be some hella backlash ;)
[23:55:18] <AR_> <r00t4rd3d> he must have some numbers off in his setup or something
[23:55:20] <AR_> why do you say that
[23:55:27] <Jymmm> Tom_itx: "No, I'm not mad"
[23:56:01] <Jymmm> Tom_itx: and the most famous one of all "Nothings wrong"
[23:56:21] <Jymmm> "Nothing's wrong, I'm fine"
[23:57:26] -!- stsydow has quit [Quit: Leaving]
[23:57:39] <ReadError> "I dont care how much money you make"
[23:58:27] <AR_> and yes i am using mastercam
[23:59:19] <AR_> the reason there is not nice pocket edge is because i was using a facing toolpath that went past the part edge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}